- @hjs314159
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
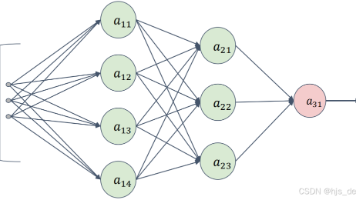
激活函数在神经网络中发挥着至关重要的作用,不仅能够处理复杂的非线性问题,还能提升网络的表达能力。通过引入激活函数,神经网络能够避免仅呈现为线性模型,从而有效提升其性能。常见的激活函数包括Sigmoid、Tanh、ReLU、Leaky ReLU等,它们各有优缺点,并适用于不同的场景。为了进一步优化神经网络性能,新的激活函数如PReLU、RReLU、ELU、SELU和Maxout等相继被提出,这些函数
在机器学习和深度学习的任务中,模型的性能评估至关重要,而评价指标则为我们提供了多角度的衡量标准。常见的分类模型评价指标包括精确率(Precision)、召回率(Recall)、F1-Score、IoU、置信度、AP(平均精度)和mAP(平均精度均值)等。每个指标侧重于不同方面的性能表现,如精确率衡量模型正确预测的比例,召回率则关注模型对真实对象的检测能力,IoU用于衡量预测框与真实框的重叠度,置信

在学习会议论文中的创新点时,我们主要探讨了深度学习模型的三类改进方法:模块改进、网络结构改进和损失函数改进。模块改进通常通过替换或优化现有模块(如卷积层、检测头等)来提升性能,适合初学者;网络结构改进则涉及调整骨干网和颈部网络以提高模型的特征提取和小目标检测能力,通常需要较强的基础;损失函数改进则分为现成应用、融合新方法和原创性改进,旨在优化模型训练过程中的目标函数。

本文讨论了消融实验在深度学习中的重要性,强调了通过逐步移除或修改模型组件来评估其对整体性能的贡献。文章指出,消融实验需要精心设计,包括选择合适的评估指标(如模型复杂度、准确度和实时性),并确保每个模块的加入能带来性能的提升。对于会议论文,建议通过逐步累加模块的方式进行实验,并简要阐述每个改进的效果,而不必详细列出每个数据变化。此外,消融实验可以与对比实验结合,以节省篇幅。
本文介绍了两种模块应用策略:一种是直接使用现有模块并根据论文需求修改其结构图,另一种是通过将多个模块结合形成新的模块,提供了具体的操作步骤和示例。博文还推荐了几款绘图工具,特别是draw.io和PPT,因其易用性和丰富的模板,适合用于绘制论文中的神经网络结构图,并强调输出高分辨率图像的重要性。

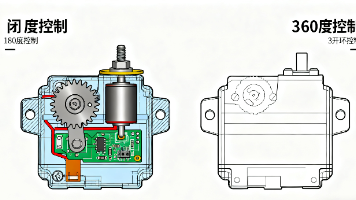
180度舵机和360度舵机是两种不同类型的伺服电机。180度舵机采用闭环控制,通过电位器反馈实现0-180度范围内的精确定位控制,适用于机器人关节等需要精确角度的场合。360度舵机本质上是改装后的180度舵机,采用开环控制,只能控制旋转方向和速度,无法精确定位,适用于机器人底盘等需要连续旋转的应用。两者的控制信号虽然都是PWM,但信号含义不同:180度舵机对应目标角度,360度舵机对应转速和方向。
嵌入式的核心是 “用有限资源解决特定问题”,学习路径的关键是 “先夯实基础(C + 电路 + 组成)→ 用简单硬件练手(STM32 裸机)→ 学 OS 应对复杂场景(RTOS/Linux)→ 聚焦垂直领域深耕”。只要坚持 “理论 + 实践”,从点亮第一个 LED 开始,逐步积累项目经验,就能入门并成长为嵌入式工程师。

人工智能作为一门多学科交叉的新兴技术科学,正日益成为推动机械工程变革的核心动力。传统机械工程正在从以力学、结构为核心的“硬件时代”逐步迈向以智能感知、数据驱动和自动决策为特征的“智能时代”。在智能制造、机器人技术、智能控制、设计优化、故障诊断、人机交互以及嵌入式AI等方向,AI与机械深度融合,推动机械工程从设计到运维实现数字化、智能化升级。越来越多机械专业师生开始探索基于机器学习、电机健康监测、视
文章提出Mul-YOLO多模态目标检测模型,通过融合水下声信号的时间序列和时频图像数据进行频谱感知。模型采用并行双骨干网络:改进的CSPDarknet处理小波变换图像,MobileNetV1变体处理时间序列数据,并引入模态交互模块和注意力机制进行特征融合。实验表明,在低信噪比条件下Mul-YOLO的检测率达95.3%,显著优于传统单模态方法。该研究为YOLO在多模态场景的扩展提供了新思路,但实时性
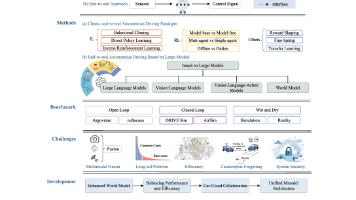
近年来,自动驾驶技术在全球范围内迅速发展,为日益严重的交通拥堵和道路安全相关挑战提供了有效解决方案。在各种范式中,端到端自动驾驶由于其简化的架构、增强的决策一致性以及出色的泛化能力,已经成为传统模块化系统的一个有前景的替代方案。本综述全面回顾了端到端自动驾驶的发展历程和核心技术,强调了模仿学习(IL)、强化学习(RL)等范式的应用与发展。此外,本文还重点介绍了由基础模型赋能的新兴范式,例如大型语言