




- @hao1183716597
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1、GIT安装、vscode安装(略)2、GO在win下安装及环境变量配置安装完GO后,创建一个目录作为工作区,如G:\my\project\go,环境变量添加GOPATH并指向该目录。在该目录下创建三个子目录bin、pkg及src。3、配置vscode如果github.com下载太慢,我们可以通过https://gopm.io/download进行下载,速度杠杠的。...
WSL+Docker创建ros2容器的过程,参考。
在vscode阅读编写c/c++代码时,体验不是很好,有时候会无法跳转。这里通过GNU Global工具解决这个问题。
vscode去远程调试方法有很多种,不同的插件对应了不同的调试方法,比如:1.C/C++插件进行GDB调试(编写launch.json文件)2.C/C++ Runner插件3.CMake Tools插件(只针对CMake工程,需要搭配C/C++插件一起使用,但无需编写launch.json)
MSP压栈顺序为R0、R1、R2、R3、R12、LR,**此处LR和上面CPU寄存器的LR是不一样的!当进入HardFault时,首先看CPU寄存器信息,这里LR用于异常返回控制,0xFFFFFFF9可以去看MSP主栈寄存器。改为int显示,直接找0x8开头的,也对应了LR。也就是说,Instance非法了,遇到这种情况可以根据map文件进行问题排查。有时候,进入hardfault时,并没有堆栈信

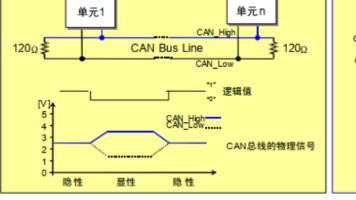
CAN2的(只有互联型设备才有CAN2)。本次使用的STM32F103C8T6只有CAN1。简单看一下,发送的数据会进入3个发送邮箱进行数据发送,接收的数据首先进过滤器,然后放到FIFO中,每个FIFO有3个接收邮箱。
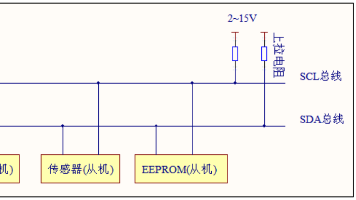
双线制总线:I2C仅使用两条线——串行数据线(SDA)和串行时钟线(SCL)进行通信,有效降低了连接复杂性。多主多从:I2C支持多个主设备和多个从设备连接到同一总线上。每个设备都有唯一的地址。总线仲裁机制保证同一时刻只有一个主设备控制总线。不同的传输速率:I2C总线支持不同的速率模式,如标准模式(100kbps)、快速模式(400kbps)和高速模式(3.4Mbps)。同步通信:I2C是一种同步通
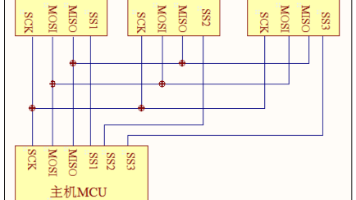
在大容量产品和互联型产品上,SPI接口可以配置为支持SPI协议或者支持2S音频协议。SPI接口默认工作在SPI方式,可以通过软件把功能从SPI模式切换到I2S模式。注意在小容量和中容量产品上,不支持I2S音频协议。通讯引脚SCK引脚:SPI1/SPI2/SPI3芯片手册中告知,最大速率18Mbps。NSS引脚:有两种NSS模式,软件和硬件。软件模式即可以用指定的GPIO来进行从设备片选。一般采用这
GPIO(General Purpose Input/Output,通用输入/输出),简单总结一下,虽然很简单=。
stm32F427,定时器的划分如下(参考官方数据手册):stm32f103定时器:这里以TIM4高级定时器为例。先看MX配置:这里的配置选项非常多,下面整理一下。可选的如下:- Disable 关闭从模式,定时器独立运行。- External Clock Mode 1,【外部时钟模式1,很特殊】 定时器时钟时钟源由外部触发信号驱动,用外部脉冲信号作为计数时钟。当设置该项时,Clock Sourc
