- @guanjing_dream
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本篇基于对《自动驾驶与机器人中的SLAM技术》中的GNSS定位相关基础知识进行总结用于备忘。

项目需求需要使用python写一个3D检测的ROS2节点,通过修改ROS2的配置文件来间接的让系统使用虚拟环境中的Python解释器。

**使用场景:** 使用windows系统下的vscode远程连接服务器的linux系统,终端提示`permission denied, please try again`,但是使用cmd是可以远程登录的。
1 搭建git使用环境包括创建本地仓库和远程仓库1.1 准备工作1.1.1 注册一个github帐号**官网地址:**https://github.com/1.1.2 配置和删除用户名和邮箱[1][2]安装完Git之后,要做的第一件事就是设置你的用户名和邮件地址。这一点很重要,因为每一个Git提交都会使用这些信息,它们会写入到你的每一次提交中,不可更改如果使用了--global选项,那么该命令只需
本文主要梳理了一些大佬关于视觉SLAM方向的面经,对于其中的一些问题根据自己需要进行了一些补充,增加和补充了关于ORB-SLAM2相关的内容,在文末提供了ORB-SLAM和ORB-SLAM2的论文翻译和代码讲解视频,资源主要来自 泡泡机器人,有需要可以自行下载学习

最近在使用ROS的时候,有时候需要启动多个终端,比如需要一个终端启动launch文件,还需要一个终端play数据集,比较麻烦,遂想通过一个脚本一次性启动多个终端,以跑个入门小乌龟为例,过程整理如下:新打开一个终端的命令格式如下:gnome-terminal -t "新终端标题" -x bash -c "执行的i命令;exec bash"# gnome-terminal:新打开一个终端# -t:给新
在跑SC-LEGO-LOAM时报错[pcl::KdTreeFLANN::setInputCloud] Cannot create a KDTree with an empty input cloude
转载链接开篇需要跟大家道歉,一切忙没时间的理由都是借口,实际上就是偷懒了,这么久才更新,非常抱歉!本篇争取以最简明的叙述,帮助大家理解下基于Region Proposal的目标检测的一系列工作,包括RCNN,Fast-RCNN,Faster-RCNN,这部分内容网上有很多博文,本文中会有很多图与其他博文相似或者雷同,如有侵权行为,请联系鄙人。讲得不好请大家海涵,若有疑点,大家可以阅读原论文。目标检
1、处于统一局域网下的两台电脑方式1:在本地电脑打开另一台电脑的文件目录系统:ubuntu系统(1)在其中一台电脑上打开任意一个文件夹(2)同时按下“Ctrl+l”键,进入到下图(3)在文件目录地址处写入:sftp://uername@xxx.xxx.xxx.xxx/path**user:**所访问电脑的用户名**xxx.xxx.xxx.xxx:**所访问电脑的ip**path:**想要访问的文件
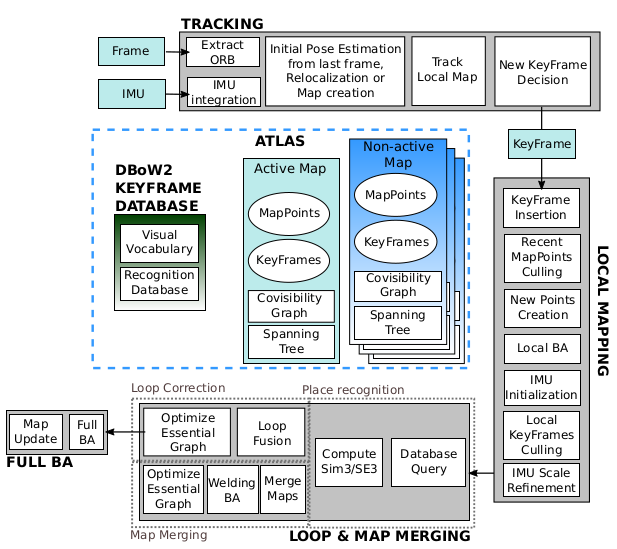
在上一章已经介绍了检测共视区域的部分,接下来就是对共视区域进行回环矫正或者地图融合。回环矫正和之前的ORBSLAM系列一致,就是消除因为长时间运动产生的位姿累计误差和尺度漂移。在ORBSLAM3中新增了多地图系统,因此出现共视区域的地方有可能出现在不同的子地图中,需要对两个子地图进行融合。本篇主要对回环矫正部分进行介绍。