- @TheSuperCompiler
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
摘要:本文总结了嵌入式Linux开发中内核模块加载失败的常见问题——“version magic不匹配”的解决经验。开发chrdevbase.ko字符设备模块时,因模块编译为ARMv6架构而目标系统要求ARMv7,导致加载失败。通过优化Makefile、检查内核配置等初期排查未果,最终发现内核源码版本与目标系统内核存在隐性差异。解决方案是更换与目标内核匹配的zImage,并强调内核与模块必须同源编
摘要:本文记录了正点原子开发板通过NFS挂载根文件系统失败的问题排查与解决方法。核心问题为NFS服务器与开发板内核的版本不兼容(服务器默认NFSv4,内核仅支持v3)。解决方法是在U-Boot启动参数bootargs中添加"vers=3"指定NFS版本,并确保内核已开启NFSv3支持。文章详细描述了问题现象、排查过程和具体解决步骤,为同类开发板用户提供参考。
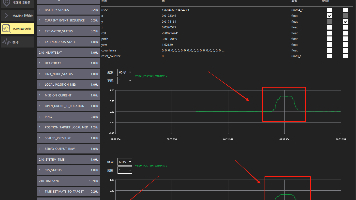
本文以 LWIP 轻量级协议栈为核心,详细解析了嵌入式系统中 TCP 服务器的构建方法。通过 Netconn API 分步实现了端口绑定、连接监听、HTTP 数据收发等核心功能,并针对内存管理、错误处理、性能优化等关键问题提供实践建议。代码示例可直接应用于物联网设备通信、工业控制等场景,文中还探讨了多线程扩展、协议解析与安全增强等进阶方向。适合嵌入式开发者快速搭建轻量化网络服务参考。

基于 VSCode 的 PlatformIO 安装步骤(针对 ESP32-S3 开发优化),结合国内网络环境适配方案

STM32串口单次发送字节限制解析1. 硬件限制STM32的USART模块硬件设计决定了其单次操作仅支持1字节(8位)数据发送。数据寄存器(TDR/RDR)为9位结构,但实际通常配置为8位模式,因此无法直接发送多字节数据。2. 数据拆分逻辑案例中拆分`short`类型(16位)为两个8位字节的原因包括:- 硬件兼容性:适配8位数据帧结构,避免直接发送多字节导致数据截断;

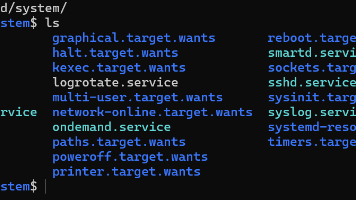
香橙派5Pro ROS自启动方案摘要:本文介绍两种设置ROS节点自启动的方法。方法一通过修改rc.local文件,直接添加启动脚本路径。方法二采用systemd服务方式,创建自定义服务文件并配置启动参数。提供的启动脚本包含60秒延迟、环境变量加载、ROS节点启动(livox驱动)和自动bag录制功能,支持数据记录和错误分析。两种方法均可实现系统启动时自动运行ROS相关服务,满足不同场景需求。
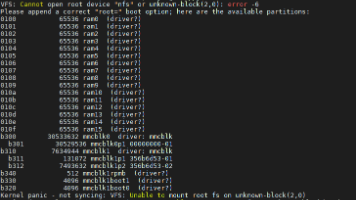
摘要: 本文详细记录了MX6ULL开发板Linux系统启动问题的完整排查过程。从NFS挂载失败(因协议版本不兼容)到本地启动Kernel panic,最终定位到根文件系统打包路径错误的核心问题。关键发现:1)NFS需指定vers=3协议;2)根文件系统打包必须进入目录内部操作,避免路径嵌套;3)U-Boot需正确配置init参数。文章提供了NFS和本地两种启动方式的完整U-Boot配置方案,总结了
《全志H3硬件启动故障排坑记》记录了嵌入式开发中遇到的典型问题及解决方案。作者先后解决了USB识别失败(需安装PhoenixSuit工具)、系统无法启动(串口日志发现内存初始化失败)、内存通道报错(热风枪重焊芯片)以及SVREF电压异常(彻底重焊BGA内存)等问题。总结出五大经验:优先串口调试、先软后硬排查、控制BGA焊接温度、监测关键信号电压、不轻易放弃硬件维修。全文通过具体案例为嵌入式开发者提

六组机器人、四足机器人、多组机器人介绍、主板、组装教程

摘要 针对无人机移动后飞控位置偏移问题,本文提出将Fast-LIO输出的里程计数据转换为MAVROS视觉定位数据的方法。通过分析发现,现有系统缺乏将外部视觉定位数据传递给飞控的机制,导致位置漂移。解决方案是开发一个转换节点,该节点实现: 订阅Fast-LIO的/Odometry话题 使用滑动窗口平均算法平滑yaw角数据 将处理后的位姿数据发布到/mavros/vision_pose/pose话题