




- @Netceor
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
该项目在pycharm上编译运行,一些涉及pycharm、Anaconda、python的bug写在另一篇博客里https://blog.csdn.net/Netceor/article/details/94725863目录一、导入opencv包二、打开视频捕获人脸一、导入opencv包Win+R,输入cmd打开控制台在控制台安装opencv-python,此处我已经安...
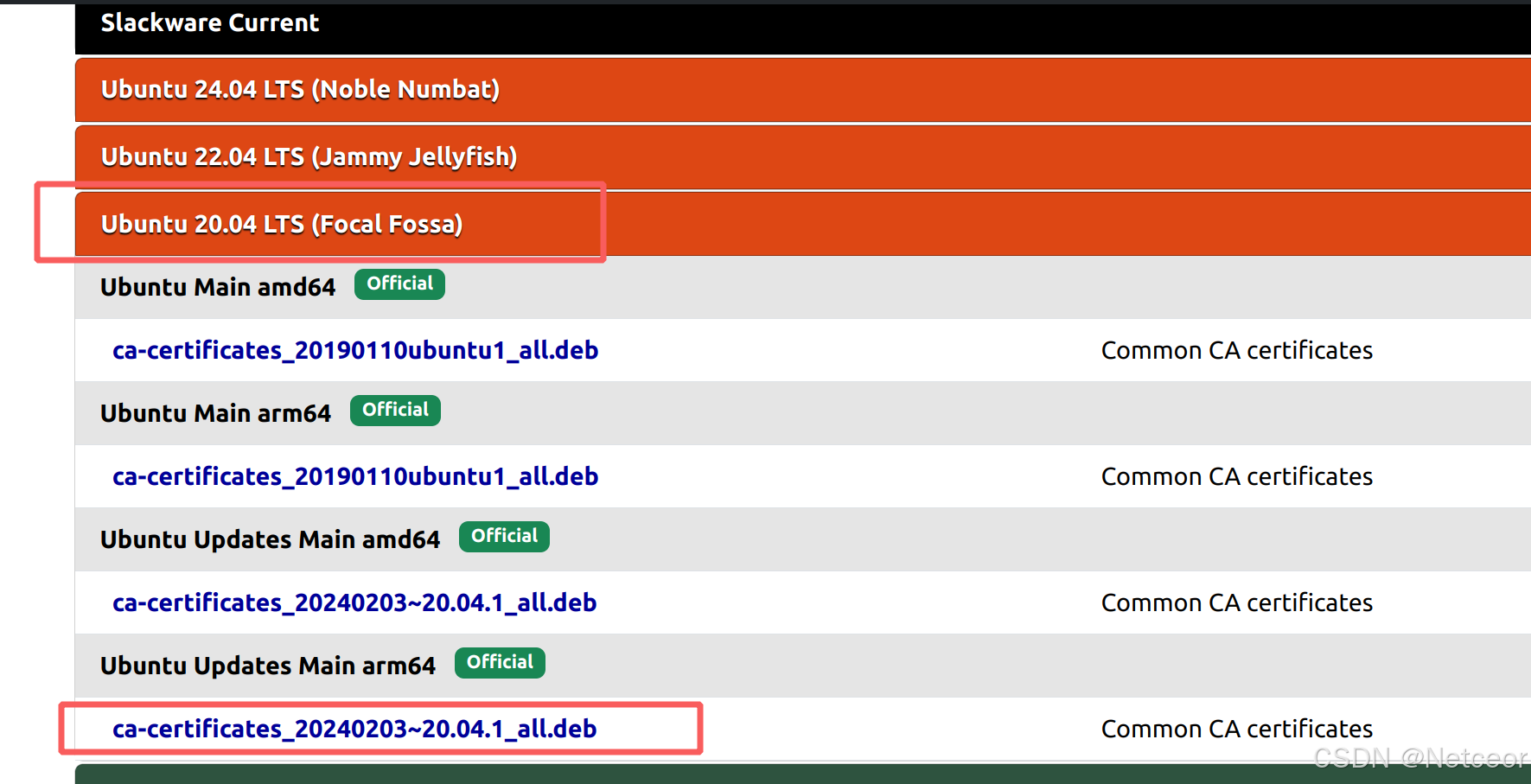
运行时报错获取:1 file:/var/cudnn-local-repo-ubuntu2004-8.9.7.29InRelease [1,572 B]获取:1 file:/var/cudnn-local-repo-ubuntu2004-8.9.7.29InRelease [1,572 B]命中:2 https://mirrors.ustc.edu.cn/ubuntu focal InRelease
1、问题在启动PicGo的时候突然出现问题,弹出一个窗口,核心问题是以下两句A JavaScript error occurred in the main processCannot read property 'push' of undefiened2、解决(1)删除配置文件找到 PicGo 的配置文件data.json,直接删除【如果不放心可以先备份一份到其他地方】,我的路径在C:\Users
共有3/5个主页面(我的课程、任务清单、个人中心)共有3个表单页面(新增课程、新增任务、新增成绩)共有6/8个二级页面(任务详情、课程内容、成绩单、我的文件、我的消息、关于我们)
目录示例1:一元函数 y=x²-1 拟合示例2:多元函数 z=sin(x2+y2)/(x2+y2) 拟合神经网络拟合工具箱 Neural Net Fitting示例1:一元函数 y=x²-1 拟合1.输入数据%输入x,yx=-3:0.2:5;y=x.^2-1;2.在Matlab的APPS菜单下找到Neural Net Fitting工具并打开,点击Next...
目录一、Anaconda 安装二、安装 TensorFlow-CPU1、配置环境2、安装 Tensorflow三、安装TensorFlow-GPU1、是否可安装GPU版Tensorflow(1)方法一:查看算力(2)方法二:Google搜索2、安装显卡驱动3、创建虚拟环境4、安装Tensorflow、CUDA、cuDNN(1)CUDA版本选择(2)cuDNN、TensorFlow 版本选择(3)方
Ubuntu将c++编译成.so文件并测试

共有3/5个主页面(我的课程、任务清单、个人中心)共有3个表单页面(新增课程、新增任务、新增成绩)共有6/8个二级页面(任务详情、课程内容、成绩单、我的文件、我的消息、关于我们)
目录一、决策树分类1.普通树2.adaboost分类3.bagging分类4.随机森林三、支持向量机(SVM)分类四、最近邻方法(KNN)分类五、神经网络分类1.拟合2.不同参数的效果分析六、总结一、数据胎心宫缩监护(CTG.xls)数据有2129个观测值及23个变量,包含了致命心律的各种度量以及基于监护记录的由专家分类的公所特征。数据可以从h...
AskMany是一款免费易用的AI模型聚合平台,支持同时调用5个大模型(如DeepSeek、GPT-4o-mini等),提供模型自由切换、收藏对话等功能。界面简洁直观,适合多模型对比使用,尤其当单一官方服务卡顿时可作为替代方案。
