




- @Hahalim
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
## 1.pip install很慢```bashpip install XXX -i https://pypi.doubanio.com/simple/pip install -e . -i https://pypi.doubanio.com/simple/# 临时使用pip install -e . -i https://mirrors.aliyun.com/pypi/simple/```**
## 1.pip install很慢```bashpip install XXX -i https://pypi.doubanio.com/simple/pip install -e . -i https://pypi.doubanio.com/simple/# 临时使用pip install -e . -i https://mirrors.aliyun.com/pypi/simple/```**
解决【Github】git bash无法复制粘贴的问题,可以通过按下鼠标右键实现快速粘贴
【人工智能导论】路径规划算法
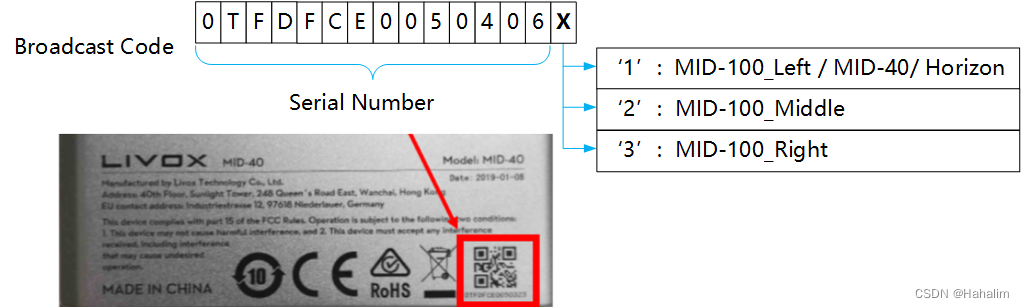
【3D激光SLAM】Livox-mid-360激光雷达ip配置,保姆级教程
【四足】ROS1到ROS2的python代码迁移教程
VINS-Mono(A Robust and Versatile Monocular Visual-Inertial State Estimator)>https://github.com/HKUST-Aerial-Robotics/VINS-Mono>==VINS-Mono的官方配置环境Ubuntu 16.04, ROS Kinetic, OpeVINS-Mono的配置环境Ubuntu 16.0
【人工智能导论】路径规划算法
## 驱动安装参考教程:https://blog.csdn.net/qq_43326927/article/details/140359613在https://launchpad.net/ubuntu/+source/backport-iwlwifi-dkms中下载backport-iwlwifi-dkms_9858-0ubuntu3_all.deb (1.6 MiB)文件。百度网盘链接:http
1、打开vscode,在vscode下有两个json文件:Alt2、修改c_cpp_properties.json注意 "includePath"要替换为自己的路径{"configurations": [{"name": "Linux","includePath": ["/opt/ros/bouncy/include/**","/home/hahalim/ros2_ws/src/my_node/