- @Callme_TeacherPi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
[已解决]ROS无法连接raw.githubusercontent.com和raw.github.com的问题。首先通过以下网站查询raw.githubusercontent.com和raw.github.com对应的IP。1.打开以后按a键,进入插入模式,可以进行编写。2.在最下面输入185.199.111.133 raw.githubusercontent.com(另一个网址方法雷同)。3.按
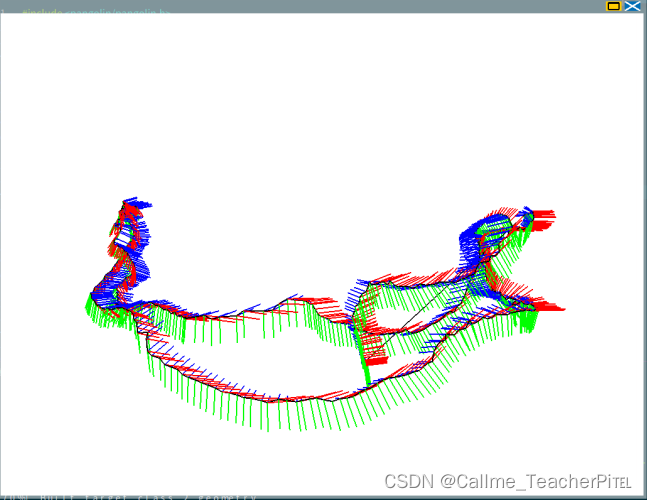
[3D检测系列-PointRCNN]复现PointRCNN代码,并实现PointRCNN3D目标检测可视化,包含预训练权重下载链接(从0开始以及各种报错的解决方法) 1.下载代码2.准备数据集(1)使用官网提供的数据集格式(2)使用软连接3.检测结果4.结果可视化(1)仅显示LiDAR(2)显示LiDAR和图像(3)显示具有特定索引的LiDAR和图像(4)显示带有modifiedLiDARfile

Jetson Nano使用CSI摄像头以及USB摄像头(CSI摄像头打开失败,USB摄像头打不开) 网上非常多的代码打不开的原因是要使用Python2!!!Python2!!!Python2!!!重要的事情说三遍!!!可能是因为Gstreamer管道只适用于Python2,如果后期找到Python3能运行的话再更新。同理先查看上一步是否已经有USB摄像头了,如果有了的话可以直接上代码。注:cap

[3D检测系列-PointRCNN]复现PointRCNN代码,并实现PointRCNN3D目标检测可视化,包含预训练权重下载链接(从0开始以及各种报错的解决方法) 1.下载代码2.准备数据集(1)使用官网提供的数据集格式(2)使用软连接3.检测结果4.结果可视化(1)仅显示LiDAR(2)显示LiDAR和图像(3)显示具有特定索引的LiDAR和图像(4)显示带有modifiedLiDARfile
Jetson Nano通过串口与Arduino进行通信----使用python对电机进行控制(Jetson Nano,Arduino,L298N,ZS040)
[已解决]Ubuntu18.04使用Pangolin报错原因与解决方法、以及Pangolin的安装方法!!!视觉SLAM十四讲ch3报错原因解析!!!此处我们安装的版本就是高老师所提到的版本,如果大家是根据十四讲来的话建议就下这个版本。不要去搜其他的Pangolin安装方法。不然的话版本出现问题会需要报错。首先遇到这个问题的话,主要是文件编译的时候找不到Pangolin链接的库,主要是需要修改CM
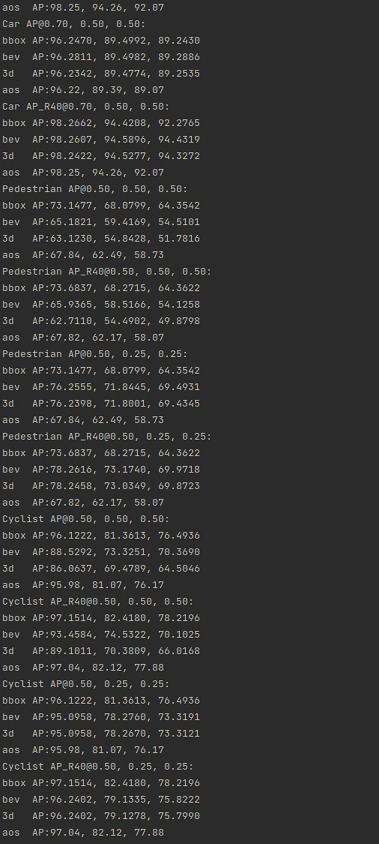
[3D检测系列-PV-RCNN] PV-RCNN论文详解、PV-RCNN代码复现、包含官网PV-RCNN预训练权重及报错问题一、论文详解2、体素到关键点场景编码2.1、关键点抽样2.2、体素抽象3、VSA模块(体素集抽象模块)3.1、预测关键点权重4、提案细化的关键点到网格RoI特征抽象4.1、通过集合抽象进行RoI网格池化4.2、3D提案细化和置信度预测5、训练损失二、代码复现1、Copy代码2
Python调用安民威视、海康威视等网络摄像头方法(并实现KCF目标追踪和代码),一、利用OpenCv调用网络摄像头核心:调取网络摄像头的核心是利用rtsp通道来获取网络摄像头的信息流。(1)首先需要将电脑网络与摄像头网络处于同一个局域网或交换机下。(2)查询摄像头的用户名(未作修改的话一般为admin)3)查询摄像头的IP和htps(这两个一般会写在摄像头上或说明书上)(4)通道直接设为1就可以
[3D检测系列-PointRCNN]复现PointRCNN代码,并实现PointRCNN3D目标检测可视化,包含预训练权重下载链接(从0开始以及各种报错的解决方法) 1.下载代码2.准备数据集(1)使用官网提供的数据集格式(2)使用软连接3.检测结果4.结果可视化(1)仅显示LiDAR(2)显示LiDAR和图像(3)显示具有特定索引的LiDAR和图像(4)显示带有modifiedLiDARfile
基于Opencv(KCF)的目标检测算法----代码以及常见错误(Traceback (most recent call last) Exception("追踪器工作初始化失败",AttributeError: module 'cv2.cv2' has no attribute 'TrackerTLD_create',AttributeError: module 'cv2.cv2' has no