- @BIT_HXZ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
张量投票:(注:下文中的“点”指的是,用传感器模型获得的环境的离散化表示,如用激光雷达获取的点云,或者是把双目相机的图像转换得到的点云等)Stumm等人提出张量投票是一种获得密集几何信息的方法。基本上,张量投票通过点投票提取几何基元(例如平面、直线和球体)和相关的显著性(这里理解为:是某种几何基元的可能性大小)。这个过程通常分为两步:首先,假设点是球体,它们之间进行投票,以获得局部结构的第一个想法
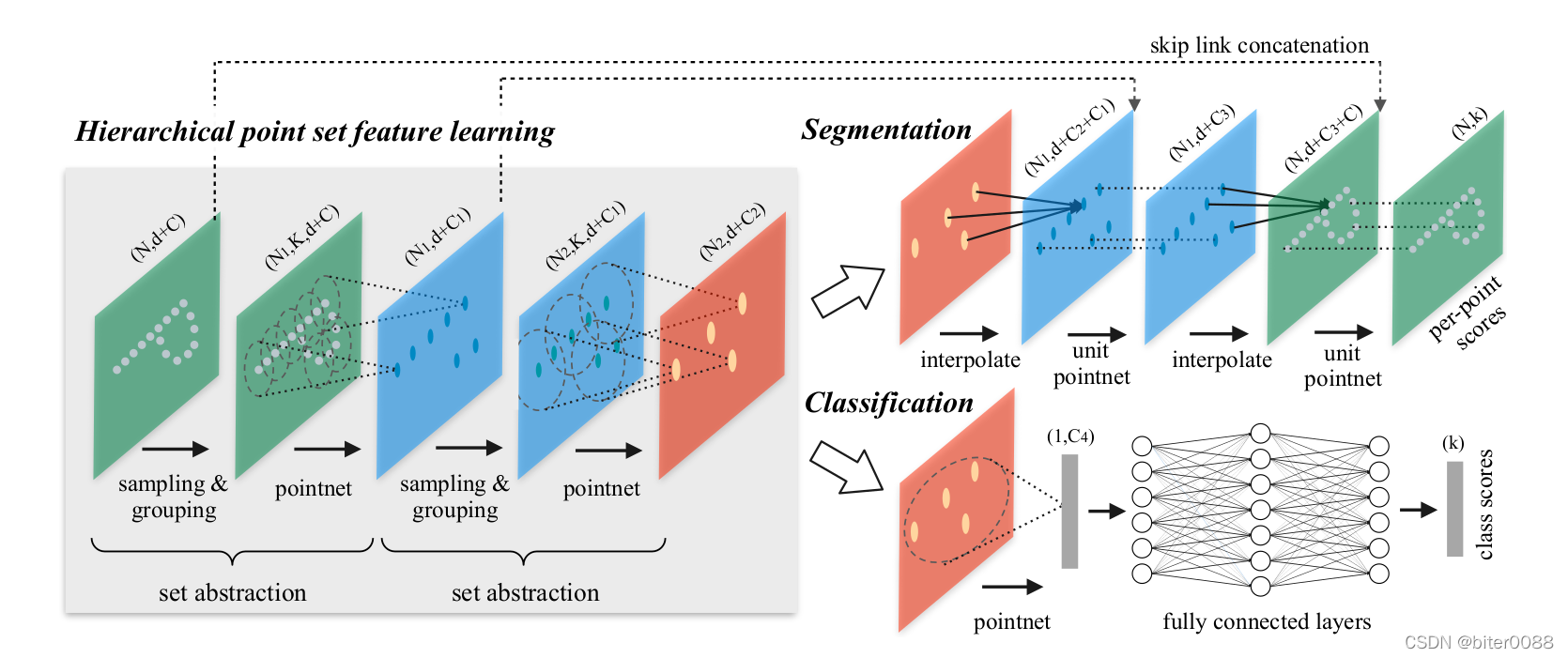
原文名称: PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space译文名称:PointNet++:度量空间中点集的深度分层特征学习在这项工作中,我们提出了 PointNet++,这是一种强大的神经网络架构,用于处理在度量空间中采样的点集。PointNet++ 在输入点集的嵌套分区上递归地运行,并且
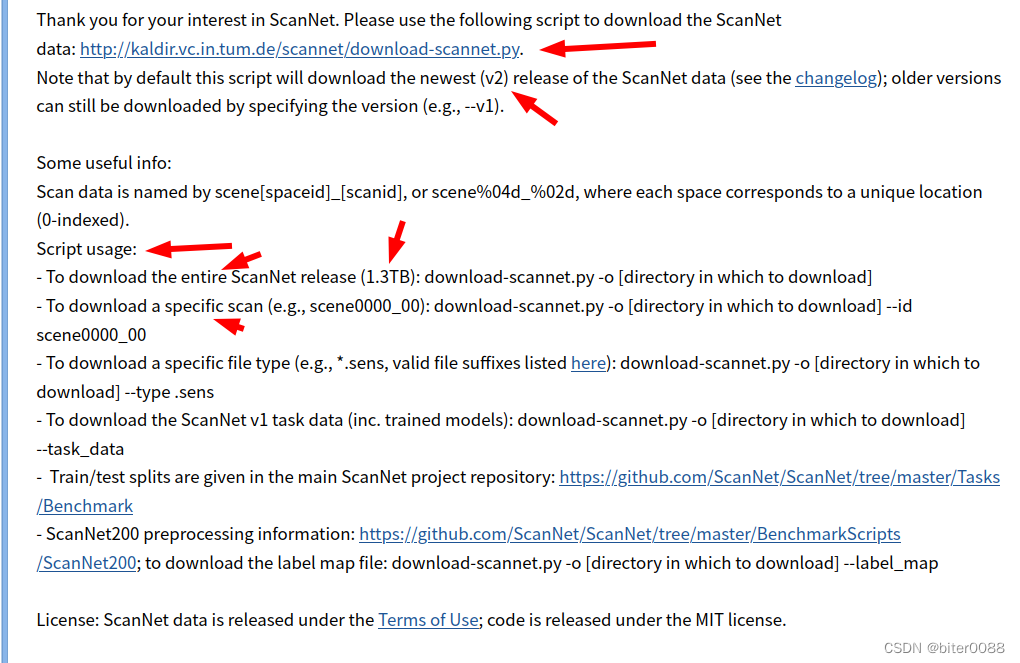
ScanNet是一个RGB-D视频数据集,包含1500多个扫描中的250万个视图,用3D摄像机的姿势、表面重建和实例级的语义分割来注释。为了收集这些数据,我们设计了一个易于使用和可扩展的RGB-D捕捉系统,包括自动表面重建和众包语义注释。我们表明,使用这些数据有助于在几个三维场景理解任务上实现最先进的性能,包括三维物体分类、语义体素标签和CAD模型检索。
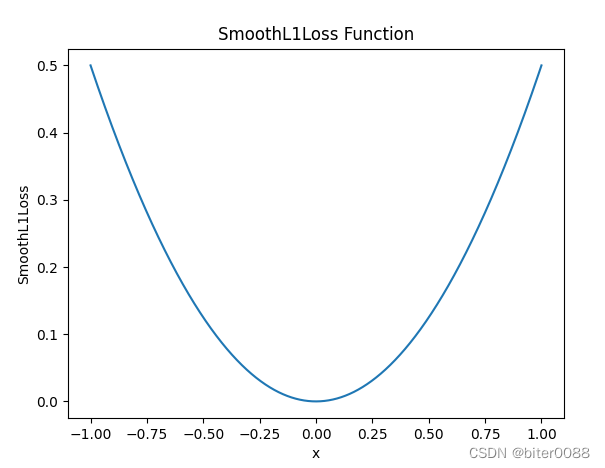
SmoothL1Loss损失函数
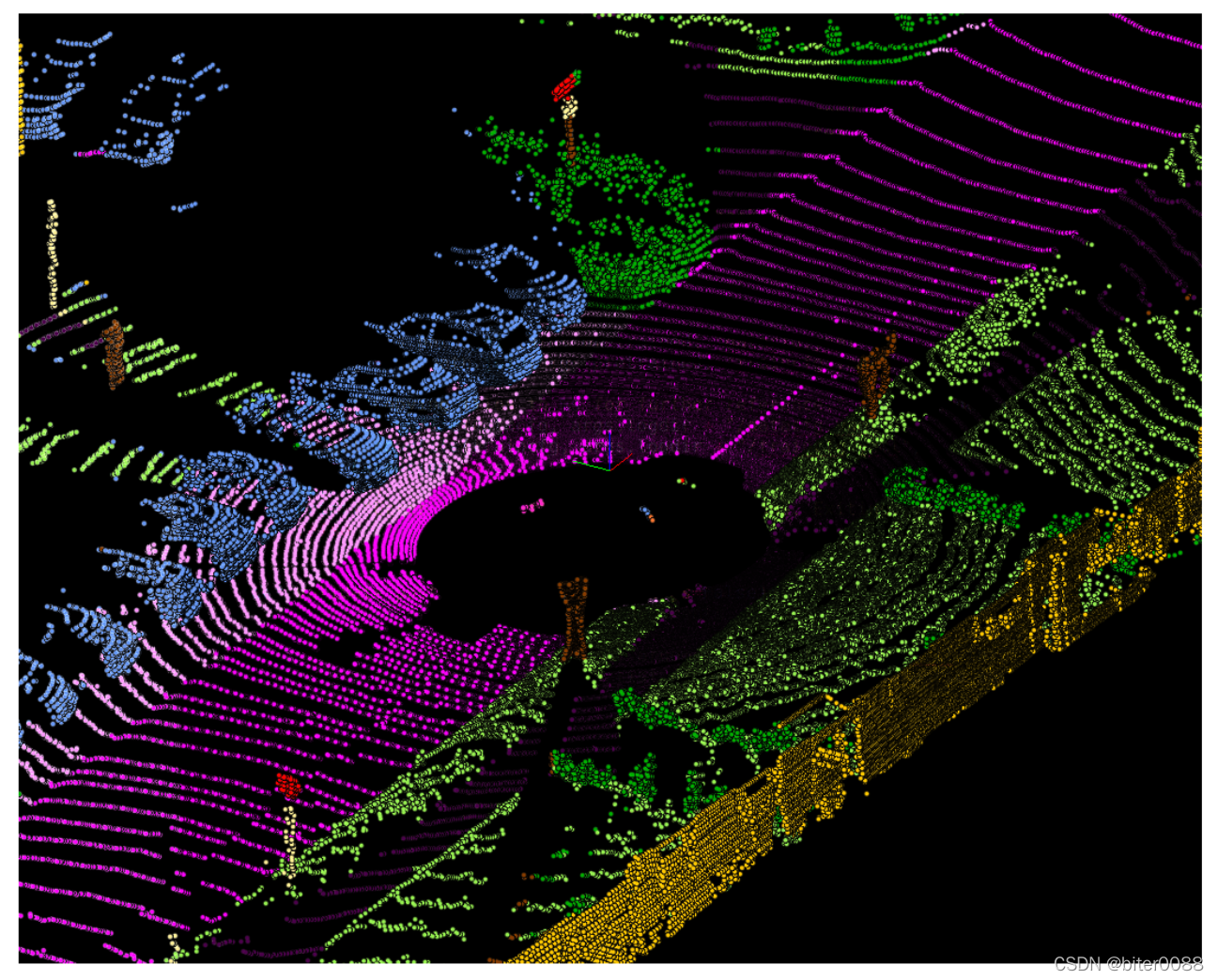
0 前言本机:RTX3070,cuda-11.0官方github:https://github.com/PRBonn/lidar-bonnetal论文:RangeNet++: Fast and Accurate LiDAR Semantic Segmentation0.1 KITTI语义分割数据集--SemanticKITTI链接:SemanticKITTI - A Dataset for LiD
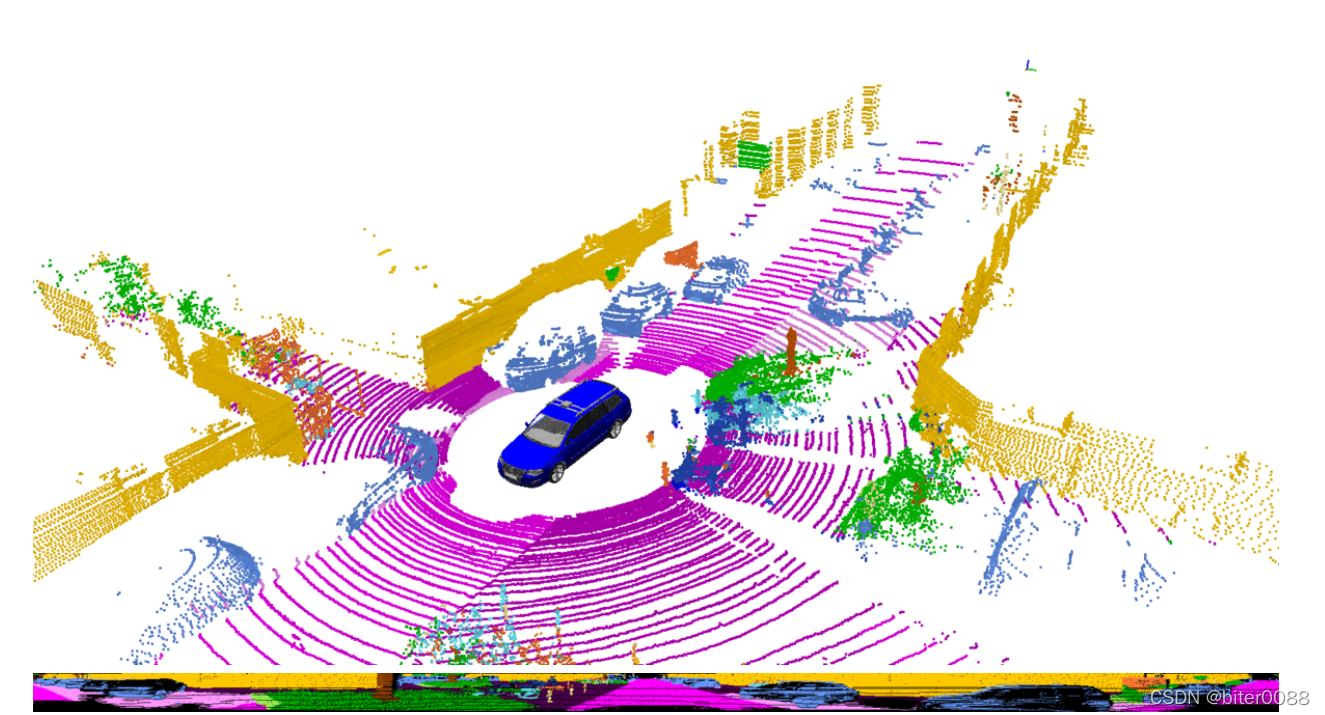
RangeNet++: Fast and Accurate LiDAR Semantic SegmentationRangeNet++:快速准确的 LiDAR 语义分割目录摘要1 Introduction2 Related Work3 Our ApproachA. Range Image Point Cloud Proxy Representation(距离图像点云代替表示)B. Fully Co
NeRF代码基于tensorflow1写的,我电脑是RTX3070只能使用tensorflow2,而且我也懒得(没那个能力)再去代码里修改tensorflow1和tensorflow2的区别了,于是先放弃复现。nerf-pytorch项目是 NeRF 的忠实 PyTorch 实现,它在运行速度提高 1.3 倍的同时重现结果;下面就演示了nerf-pytorch代码的运行。二者在github上都是几

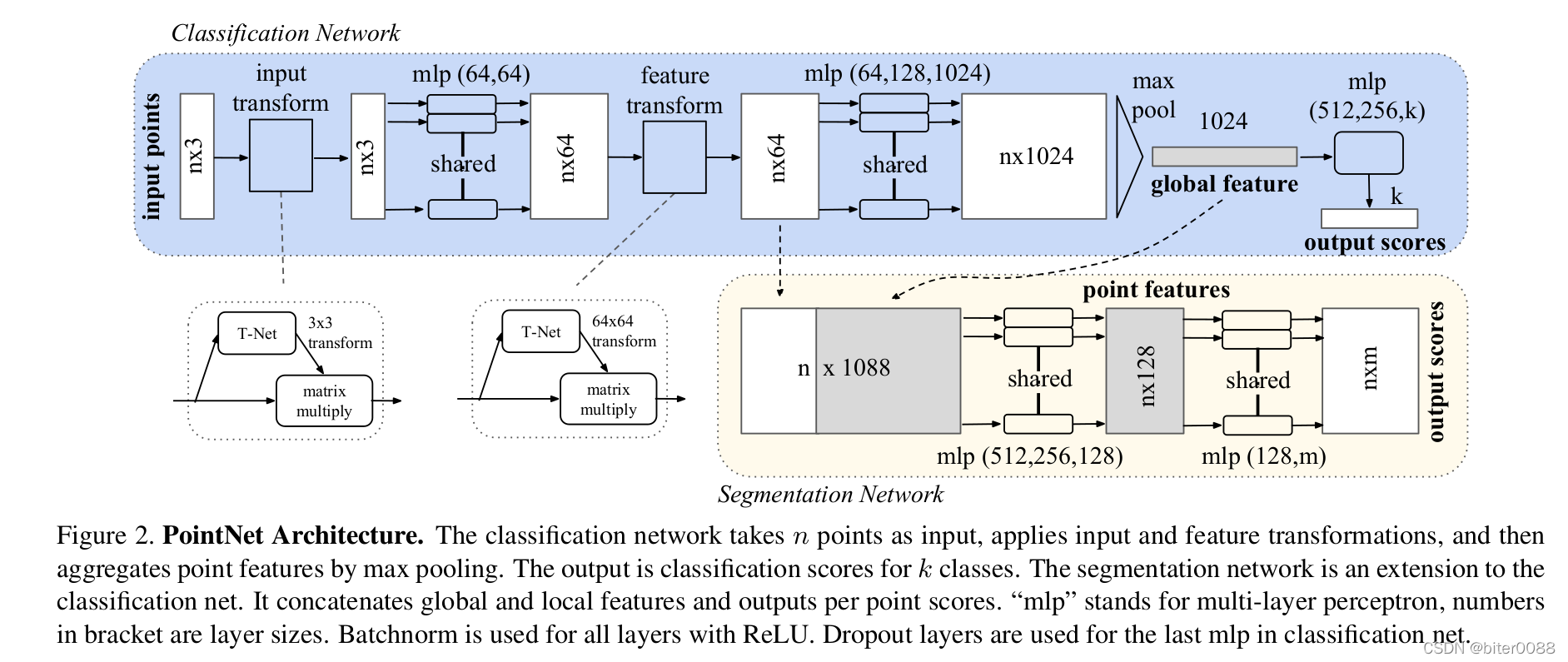
PointNet:用于 3D 分类和分割的点集的深度学习PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation正在上传…重新上传取消Abstract点云是一种重要的几何数据结构。由于其不规则的格式,大多数研究人员将此类数据转换为规则的 3D 体素网格或图像集合。但是,这会使数据变得不必要地庞大(vol
1.安装ubuntu18.04双系统说明:win11+ubuntu18.04ubuntu18.04镜像地址(可以用迅雷等下载):Alternative downloads | Ubuntu得到文件:ubuntu-18.04.6-desktop-amd64.iso下载Rufus:Rufus下载地址:Index of /downloadshttps://github.com/pbatard/rufus

1 安装使用pip安装即可pip install kitti2bag其中kitti2bag的github链接:https://github.com/tomas789/kitti2bag如果因为proxy代理的原因,一直pip install不了,可以试试换台电脑转换数据(这或许更有用)2.下载并解压数据数据到网页:The KITTI Vision Benchmark Suite下载数据(可能需要注