




- @Akaxi1
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
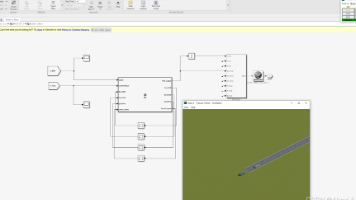
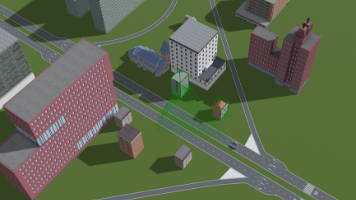
【基于PID控制 + Prescan + Matlab/simulink的车辆路径规划仿真】场景绘制 | 车辆速度 | PID控制 | 仿真测试 | 全过程图文by.Akaxi
【Ren'py】视觉小说游戏开发引擎 | 个人开发 | 基础 | 语法 | 自用 by.Akaxi

【基于Agilex松灵小车的传感器数据处理】车载软件开发基础 | 任务一 | 保姆级教程 | opencv图像处理 | pcl点云处理 | odom里程计处理 | 全过程图文by.Akaxi

【基于Prescan + Matlab/simulink的自动驾驶air传感器模拟仿真】基础道路 | 车道方向 | 道路标志 | 车道线 | 传感器 | 全过程图文by.Akaxi
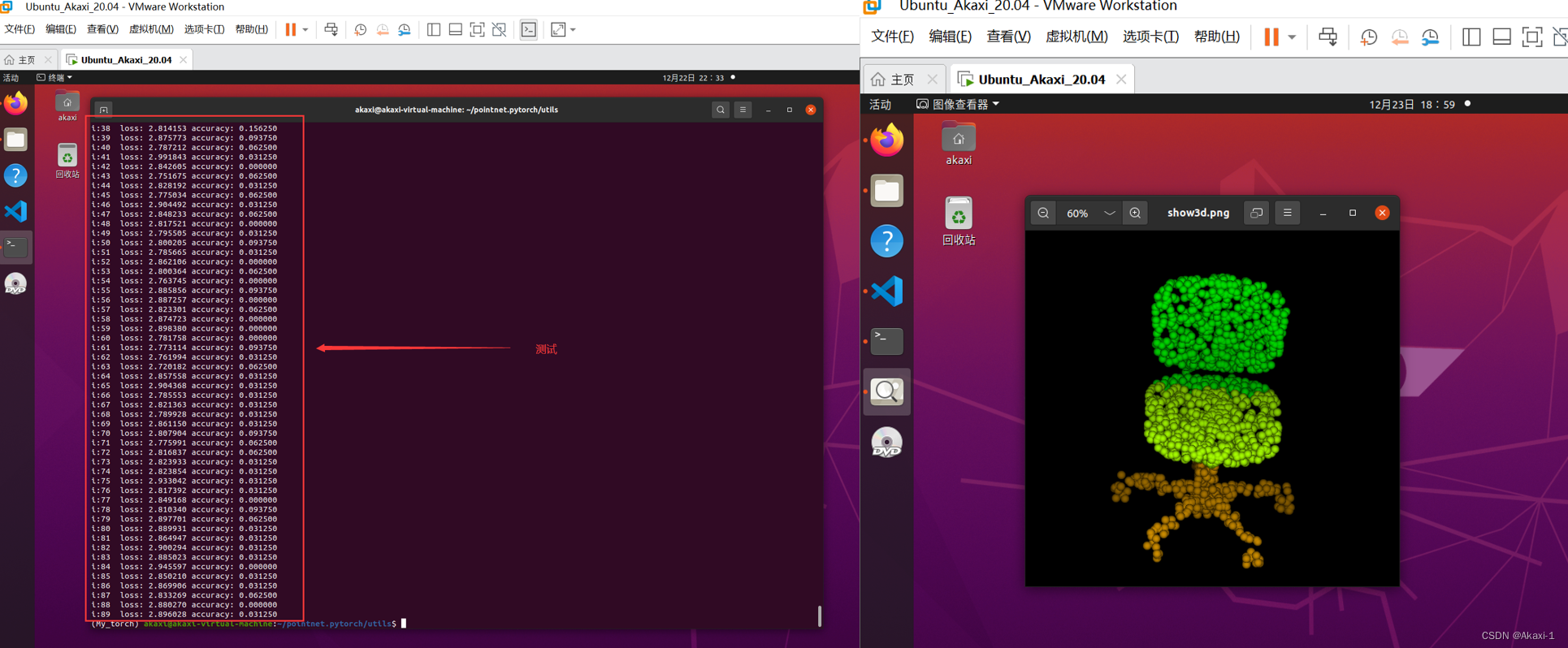
【基于Ubuntu下pointnet++激光点云目标检测】保姆级教程 | 环境配置 | 数据集下载 | 修改配置 | 训练以及测试 | 全过程图文by.Akaxi
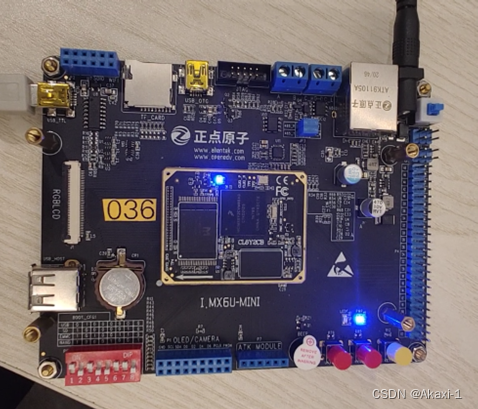
【嵌入式Linux程序开发综合实验】-1(附流程图) | ARM开发板 | 测试“Hello World” | Makefile文件 | 实现加法相加(任务:编写在标准输出终端输出“Hello World!”的C语言代码以及输入指定数字相加结果、Makefile,并分别编译出在PC与ARM上运行的可执行程序文件。)
【基于3D Gaussian Splatting的三维重建】保姆级教程 | 数据集制作 | 训练可视化自己数据集 | torch | colmap | ffmpge | 全过程图文by.Akaxi
【基于Prescan + Matlab/simulink的自动驾驶air传感器模拟仿真】基础道路 | 车道方向 | 道路标志 | 车道线 | 传感器 | 全过程图文by.Akaxi
【自动驾驶系列丛书学习】1.《自动驾驶技术概论》学习笔记
博主依托自动化学院学生学习与发展指导中心,开设了一门课程竞赛兴趣班,主要内容为ROS智能车—自动驾驶入门与实战,旨在帮助对ROS机器人操作系统、智能车、自动驾驶相关方面感兴趣的大一、大二、大三同学,深入学习基础知识并进行对应实战,从基础开始一步一步,最后在智能小车上完成实战,全过程引导,保姆级教程!
