




- @zataji
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
博主最近刚买了台RTX 3070的电脑,顺手刷了个ubuntu系统专门玩Carla仿真,为了方便查资料,也顺手搭了浏览chatgpt的环境,用的clash,还挺好用的。然后刚好在看Carla的boudingbox生成方法,里边用到了opencv的库,于是赶紧让chatgpt这个工具人帮我看看怎么安装,毕竟你是潮流。于是啪啪啪很快就出来了,生成命令全程30s不到,看着都是命令行也挺简单的,于是来给大

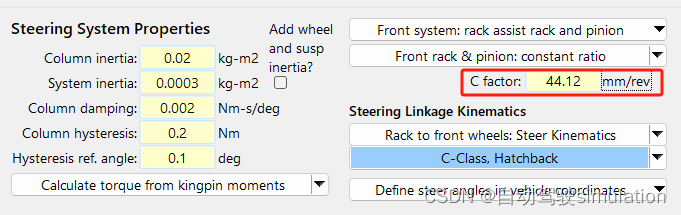
2、设置方向盘输出角度为120deg,由于12 = 传动比 = 方向盘角度 / 前轮转角,因此前轮转角大概为10deg左右;2)假设取左前轮斜率的平均值,得Steer Kinematics(平均) = 0.45 (deg/mm);转向传动比(Steering Ratio)表示方向盘转动角度与车轮转动角度之间的关系。曲线结果符合预期,因此公式正确;齿条位移和前轮转角之间的关系。方向盘转一圈齿条移动的
Autosar架构下arxml文件作为通用数据库文件,在数据传输和存储中起到关键作用。行业上其实有一些arxml的工具可以将arxml转换成dbc,再将dbc转换成自己想要的数据,但是拿到的数据是不完整的,arxml有一些数据dbc是没有的,也根据缺少的数据直接到ARXML拿,不用硬解ARXML。想要解析ARXML的最好的方法就是对原始数据进行处理。网上有一些python的库推荐,如xml.etr

Autosar架构下arxml文件作为通用数据库文件,在数据传输和存储中起到关键作用。行业上其实有一些arxml的工具可以将arxml转换成dbc,再将dbc转换成自己想要的数据,但是拿到的数据是不完整的,arxml有一些数据dbc是没有的,也根据缺少的数据直接到ARXML拿,不用硬解ARXML。想要解析ARXML的最好的方法就是对原始数据进行处理。网上有一些python的库推荐,如xml.etr
本文介绍一种在carla中比较简单的变道路径规划方法,主要核心是调用carla的GlobalRoutePlanner模块和PID控制模块实现变道,大体的框架如下图所示。

提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档文章目录前言一、Ubuntu的双显卡设置二、双Fisheye的配置过程1.引入库2.读入数据总结提示:以下是本篇文章正文内容,下面案例可供参考一、Ubuntu的双显卡设置1)我这里介绍的是使用两张显卡去处理这2个fisheye,因此显卡会有些特殊配置,包括分辨率,下图就是我想去实现的概况;2)通过nvidia-setting将下面显卡
Labview控件外观设计一、自定义UI效果展示二、UI设计方法:布尔控件三、阿里矢量图网站直达一、自定义UI效果展示二、UI设计方法:布尔控件右键控件 - 高级 - 自定义 - 切换自定义模式 - 更改控件状态图片1、右键控件选择自定义2、切换至自定义模式3、将想要更改的样式图片复制到控件上4、依次更改图片项的2、3、4,代表布尔控件的触发状态,这里的2、3、4可以使用不同的照片;5、保存控件三
文章目录一、关键设置参数二、操作方式1、插入CAPL脚本2、编辑CAPL脚本一、关键设置参数只要在定义message下面两个参数的值并设置为1时,即可发送CANFD报文FDF:If not 0, NM messages will be sent with FD Format indicator (FDF) equal to 1 (i.e. as CAN FD message).BRS:If not

文章目录一、NVIDIA显卡驱动安装的方法1、3种安装方式:建议方式二2、原显卡驱动卸载二、方式一(官网下载驱动包)步骤一:查询显卡支持的驱动步骤二:通过命令进行驱动安装二、方式二(software & updates)步骤一:打开系统设置中的software & updates;步骤二:打开系统设置中的software & updates;三、方式三(包管理器 apt )