




- @xuguosheng1992
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
视频标题:【校史馆の新晋顶流】RDK X3机器人:导览员看了直呼内卷视频文案:跑得贼稳团队用RDK X3整了个大活——给校史馆造了个"社牛"机器人!从硬件搭建到算法调试,完整开发过程大公开!基于RDK机器人开发者项目投稿可联系:yanxia.li@d-robotics.cc图文标题:基于RDK X3的"校史通"机器人:SLAM导航+智能交互,让校史馆活起来!图文内容:智慧校园:校史馆也疯狂在科技狂

本次竞赛的模拟赛环节突破了传统仿真框架强依赖显示器及实体机环境的限制,地瓜机器人云平台为参赛团队提供了稳定、高效、并行多卡的仿真评测平台,最多可支持超百支队伍实时在线PK各家的具身操作模型。本次竞赛的评测平台在竞赛后也将长期对外开放,地瓜机器人作为业内领先的软硬件机器人通用底座提供商,甘愿做好底层赋能,助力改善算法效果验证碎片化的现状,加速具身智能的技术迭代。模拟赛阶段的刚性物体操作项目着重于对刚

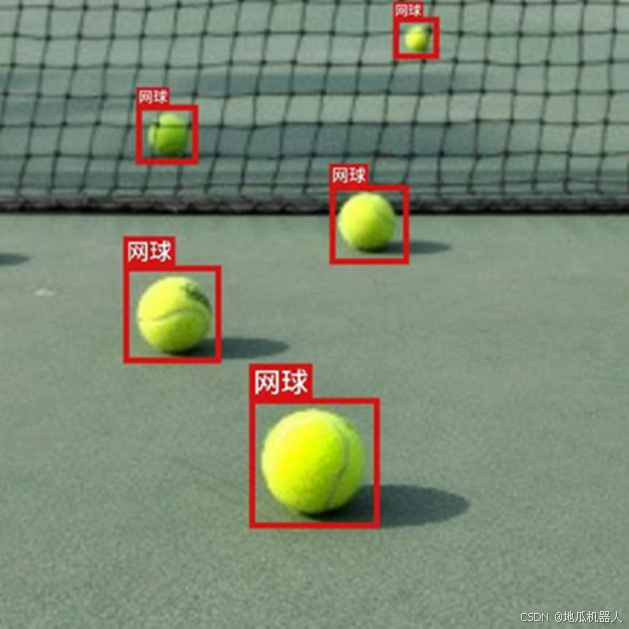
本项目致力于打造一款智能网球捡发服务型机器人,帮助提升网球场上的捡球效率,让运动员专注训练的同时,减少人工成本。机器人将具备自主捡球、精准发球和智能定位等核心功能,让捡球变得更高效、更聪明!
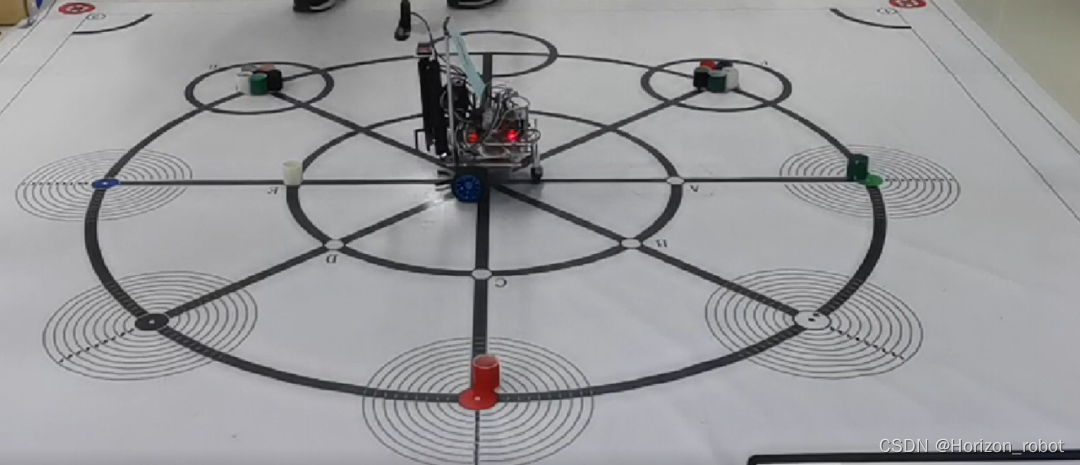
智能搬运机器人是机器人的一个细分领域,现在已广泛应用于制造业、物流行业等一些物联网联网作业中。机器人搬运的优点在于自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性;而难点在于轨迹预测和目标识别,时常出现机器人脱轨、目标识别障碍等……
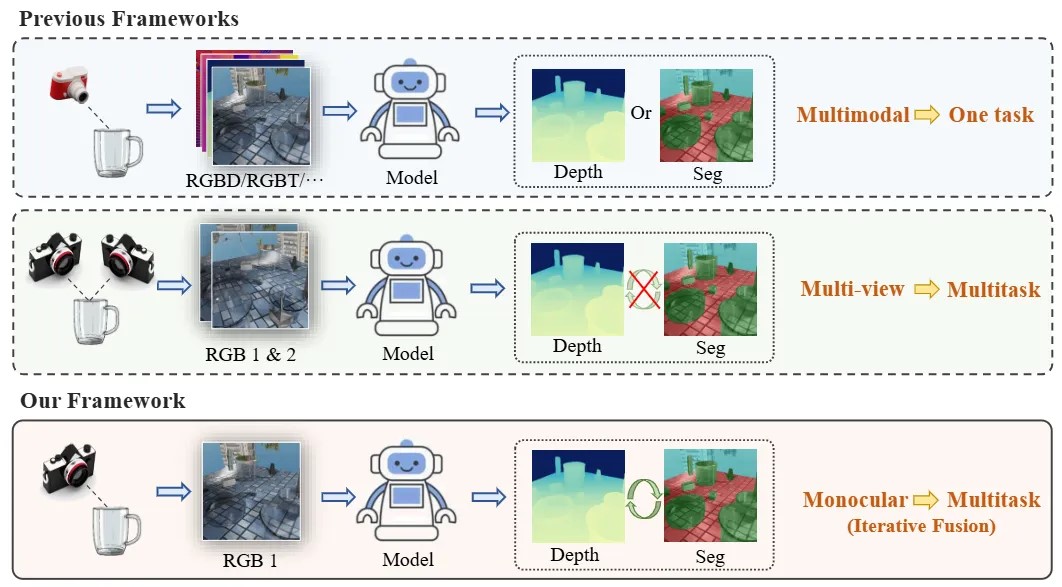
主要聚焦于透明物体的深度估计,通过设计的语义和几何结合的多任务框架,获取物体准确的深度信息,之后结合基于点云的抓取网络实现透明物体的抓取。通过在两个数据集上的定性对比结果可以看出,由于透明物体会错误地折射背景,并且在RGB图像中缺乏纹理,因此SimNet、MVTrans等方法无法获得令人满意的预测,从而导致深度图和分割掩膜的。,便可实现透明物体的抓取,效果上甚至要优于其它双目和多视图的方法,可以广
每一次握手,都是生态疆域的拓展。短短半年间,从亚洲的东京、首尔、新加坡、马来西亚,到欧洲的阿姆斯特丹、巴黎、慕尼黑、巴塞罗那、纽伦堡,地瓜机器人的足迹跨越山海,积极推动与世界各地企业、技术社区、学校的合作,用开源精神与创新基因点燃机器人行业的未来之火,在开发者的心里种下机器人梦想的“瓜”。目前,地瓜生态已经实现LeRobot项目在RDK X5上的应用部署,接下来的时间里会不断优化算法效果,提升运行
更多讨论请加入地平线开发者社区畅所欲言,欢迎开发者们踊跃投稿,技术交流,共同进步,我们将为热爱技术交流、贡献心得的你送上地平线专属惊喜礼物,期待与开发者一起探索,共建开源生态!
以旭日®智能计算芯片和RDK®机器人开发者套件为核心,地瓜机器人提供了 5~128 TOPs 多层级的智能计算平台,横向覆盖人形机器人、轮足机器人、四足机器狗、服务陪伴机器人、物流AMR、扫地机器人、割草机器人多种场景;为了全面推进机器人的智能化进程,地瓜机器人践行软硬结合的前瞻技术理念,基于领先的深度学习与决策推理算法能力,面向具身智能机器人打造了兼备极致性能和高效灵活的智能计算平台,为机器人环

一切,都是根据需求来选择的。旭日3派目前对标Jetson Nano,三点大优势算力/功耗比高、重量轻、价格低,是一款深度学习嵌入式开发板
地瓜机器人RDK X5机器人开发者套件,搭载旭日5智能计算芯片,拥有10 TOPs算力,配合先进大模型及视觉算法,是千元内机器人开发平台的不二之选,只需一根Type-C线,就能玩转上百种应用,让你轻松开启机器人开发之旅。在直播中,地瓜机器人开发者社区负责人徐国晟将带来RDK X5的核心功能解析与实战案例分享。RDK X5不仅硬件出色,还配备了软硬协同、端云一体的全链路开发平台,100+机器人配件自
