- @wotaifuzao
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
从“第一性原理”角度重新拆解嵌入式系统的本质,核心观点是:指针本质上只是地址,中断本质上只是硬件触发的函数调用,寄存器本质上是带副作用的全局变量,而 RTOS 任务切换本质是寄存器上下文的保存与恢复。文章通过大量底层示例、反汇编分析与真实 Bug 案例,把 C 语言语义、CPU 指令、内存布局、中断机制与 RTOS 调度串联起来,帮助开发者建立“从源码直接映射到硬件行为”的心智模型。重点强调嵌入式

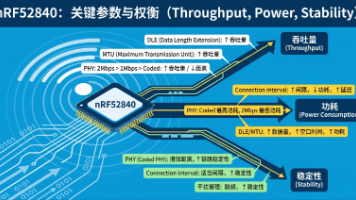
本文梳理 nRF52840 在 BLE 连接中的性能优化路径,从连接间隔、从设备延迟、监督超时到 PHY、DLE 与 ATT MTU 等核心参数进行工程化拆解,构建“吞吐量—功耗—稳定性”三角平衡模型。在此基础上,结合 Nordic SDK 实操给出 2M PHY、DLE、MTU 扩展及连接参数动态切换等关键优化手段,并通过 OTA 场景进一步验证配置组合的工程价值。文章不仅提供可落地的配置方案,
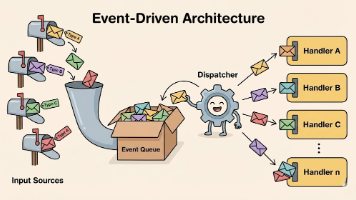
以“Agent Skills=AI外设驱动”为核心类比,阐述如何将通用大模型工程化为可落地的“专家型工具”。通过Skill目录结构(SKILL.md+scripts+references)实现能力封装,强调“渐进式披露”与上下文节省原则。重点提出四类高效指令模式:Gotchas(避坑)、Templates(模板)、Checklists(清单)、Plan-Validate-Execute(流程控制)

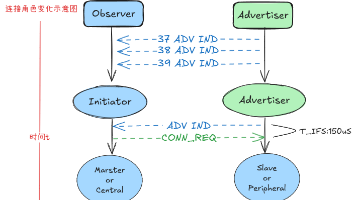
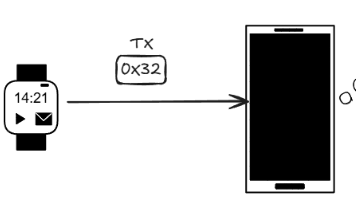
本文详细讲解BLE(蓝牙低功耗)连接的基本原理及其过程。BLE设备分为主机(Central/Master)和从机(Peripheral/Slave)两种角色,主机负责发起连接,从机负责广播并等待连接。连接建立需经历广播、扫描、连接请求等阶段,其中广播间隔和扫描窗口的重叠决定了连接成功率。连接后,设备通过连接事件交换数据,连接间隔、从机延迟和监控超时等参数影响通信效率和功耗。BLE的吞吐量受帧间间隔
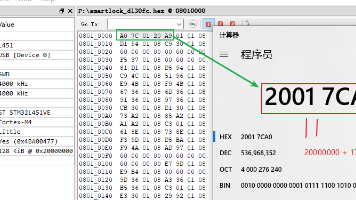
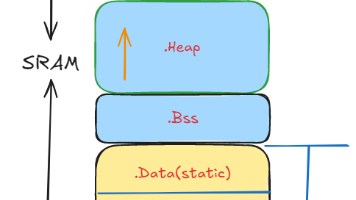
本文分析了Keil编译环境下STM32芯片Flash和RAM资源的计算方法。Flash占用包含Code、RO-Data和RW-Data,而RAM占用包含RW-Data和ZI-Data。通过.map文件可查看具体分配情况,其中RAM总用量需考虑全局变量、堆区和栈区。文章详细解释了Keil中RAM设置方法,建议合理分配Heap_Size和Stack_Size,并介绍了不同内存管理策略的适用场景。最后指
介绍了蓝牙低功耗通信中的广播与连接机制。首先,BLE通过分层协议栈打包数据,添加前导码、地址、校验码等信息确保可靠传输。广播是设备周期性在三个频道(37、38、39)单向发送数据的行为,包含设备名称、功能等基本信息,分为可连接/不可连接、定向/非定向四种类型。广播间隔为20ms~10.24s,并加入随机延时避免冲突。连接则是从广播的"一对多"转为"一对一"私
本文介绍了嵌入式系统中RAM与ROM的关键概念及其应用。首先分析了Keil编译后Code、RO、RW、ZI四类数据的存储特性,详细说明了text、data、bss、stack、heap等内存段的区别与用途,并通过代码示例展示了各类变量的存储位置。随后深入探讨了TCM、OCRAM和HBNRAM三种特殊存储器的特性:TCM具有极低延迟和确定性访问特性,适用于实时计算;OCRAM提供快速访问能力,用于高
以“Agent Skills=AI外设驱动”为核心类比,阐述如何将通用大模型工程化为可落地的“专家型工具”。通过Skill目录结构(SKILL.md+scripts+references)实现能力封装,强调“渐进式披露”与上下文节省原则。重点提出四类高效指令模式:Gotchas(避坑)、Templates(模板)、Checklists(清单)、Plan-Validate-Execute(流程控制)
在嵌入式系统中,绝大多数“现场复现、实验室无感”的致命故障,源自设计阶段缺失极端扰动推演。《What-If 设计法》通过时序失控、资源退化、存储异常、事件乱序与状态机黑洞六大维度,构建条件扰动压力矩阵,提前暴露一年后的潜伏风险。文章结合 RTOS 任务防御模型、原子提交机制与错误隔离态设计,展示如何让系统在未知冲击下仍能收敛运行。适合所有希望从“功能实现者”进阶为“系统架构师”的嵌入式工程师深读。
嵌入式系统if/else架构的困境与表驱动解决方案 传统嵌入式系统中过度依赖if/else条件分支会导致严重的可维护性问题。这种"控制流主导"的架构使系统呈现倒金字塔结构,主循环集中控制权,导致模块间高度耦合,新增功能必须修改核心逻辑。随着系统复杂度增加,组合路径呈指数级增长,成为系统稳定性的隐患。 表驱动架构通过控制反转从根本上解决这一问题。它将逻辑从代码转移到数据结构中,采