
写文章




- @weixin_51226647
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
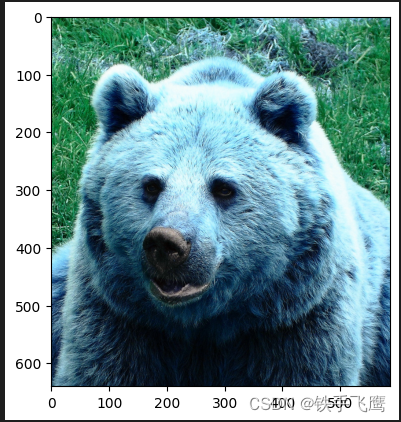
高光谱化学成分预测
评估指标计算公式核心计算逻辑要解决的核心问题计算设计的解决原理(为什么这样算)核心优点决定系数R2R^2R2R21−∑i1nyi−yi2∑i1nyi−yˉ2R21−∑i1nyi−yˉ2∑i1nyi−yi2用残差变异/总变异的占比,衡量模型解释数据变异的比例无法量化模型解释力、不同数据集/单位无法直接对比拟合效果。
[深度学习]YOLOV5预处理和后处理,源码分析
关于模型输出的说明(1, 25200, 85):👇⭐25200:每个batch的检测框数量⭐85:每个检测框包含信息[x, y, w, h, 置信度, coco_class0_score, coco_class1_score, …, …, coco_class79_score]conf_thres = 0.001 # 置信度筛选阈值max_wh = 7680 # 最大允许的检测框高宽iou_th
docker代理问题汇总
docker代理问题
[深度学习]训练速度分析,硬件
【代码】深度学习训练速度上不去(硬件篇)

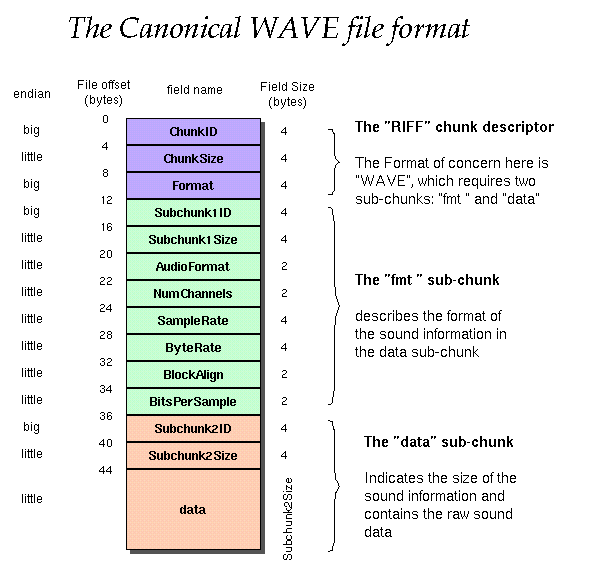
音频文件转换:PCM转WAV(C语言实现)
linux系统C语言音频文件pcm转换wav,提供实验用PCM音频文件
docker代理问题汇总
docker代理问题
解决问题:GT911触控芯片,中断引脚初始化后,自动重复的进入中断
解决问题:GT911触控芯片,中断引脚初始化后,自动重复的进入中断
[深度学习]训练速度分析,硬件
【代码】深度学习训练速度上不去(硬件篇)
[深度学习]训练速度分析,硬件
【代码】深度学习训练速度上不去(硬件篇)
解决问题:GT911触控芯片,中断引脚初始化后,自动重复的进入中断
解决问题:GT911触控芯片,中断引脚初始化后,自动重复的进入中断