




- @weixin_50508111
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
参考文章:https://zhuanlan.zhihu.com/p/205269998飞行器机体:AscTec Firefly双目VIO相机:全局快门,单色,相机频率20Hz,IMU频率200Hz,具备相机和IMU的硬件(hw)同步,双目相机型号MT9V034,IMU型号ADIS16448VICON0:维肯动作捕捉系统的配套反射标志。LEICA0:是激光追踪器配套的传感器棱镜。Leica Nova
sudo aptitude install libopencv-dev
主要针对这个问题:CMake Error at cmake/OpenCVModule.cmake:352 (message):Duplicated modules NAMES has been foundCall Stack (most recent call first):cmake/OpenCVModule.cmake:370 (_assert_uniqueness)modules/CMake
sudo aptitude install libopencv-dev
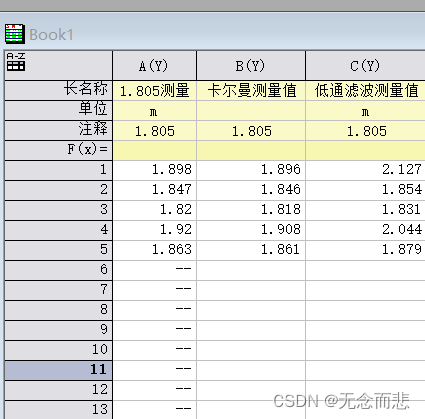
表格格式:效果:表格格式:
使用中想调整intel RealsenseD455相机输出的图像大小的时候,发现在使用ros命令:roslaunch realsense2_camera rs_rgbd.launch打开相机的时候,再使用realsense-viewer 打开官方集成的SDK相机操作界面的时候,操作界面现实无法连接到相机,情况如下:(终端表示使用ROS命令打开的相机节点)!!!!!!诡异的事情来了!!!!!如果把R
本贴参考自:https://blog.csdn.net/weixin_37661634/article/details/118902745的IMU+单目相机标定的部分kalibr官方教程:https://github.com/ethz-asl/kalibr/wiki/camera-imu-calibration一. 打印官方使用的标定板:生成标定板的命令:在这里1111111111插入代码片官方说
主要针对这个问题:CMake Error at cmake/OpenCVModule.cmake:352 (message):Duplicated modules NAMES has been foundCall Stack (most recent call first):cmake/OpenCVModule.cmake:370 (_assert_uniqueness)modules/CMake
文章搬运自:https://www.cnblogs.com/xzd1575/p/vio_timming.html通常,VIO系统忽略IMU与相机时间偏差,认为IMU和相机时间是同步和对齐的,然而由于硬件系统的触发延时、传输延时和没有准确同步时钟等问题,IMU和相机之间通常存在时间偏差,估计并纠正这个偏差将有效提升VIO系统的性能。VIO系统对两个传感器进行采样,获得相应的数据(图像、IMU数据)与
前清提要:原来在PL_Mono和PL_RGBD中使用eigen的版本是3.4.2(好像是),安装命令直接使用$ sudo apt-get install libeigen3-dev,在cmakelists.txt中的添加方式直接是find_package(Eigen3 3.1.0 REQUIRED)为了使用ORB-VINS_RK4-master,在整体编译的时候报错,查找原因说eigen版本和使用