




- @weixin_44942126
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Linux配置USB免驱相机以及利用V4L2驱动调整相机参数
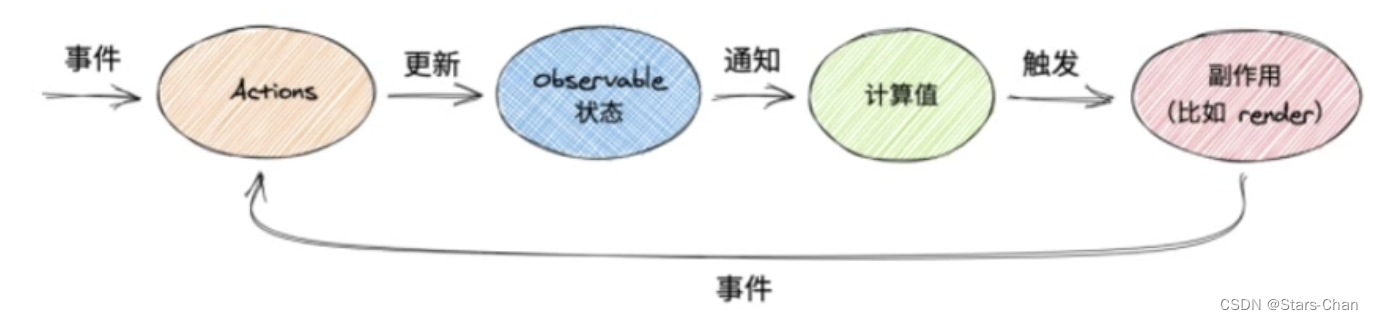
redux太繁琐?一文入门学会使用mobx简化项目的状态管理mobx是一个简单、可扩展状态工具,相比redux,具有以下特点- 简洁、无模板代码(redux需要写大量模板代码)- 响应式数据,可直接修改(redux需要保证不可变)- 可直接处理异步(redux需要中间件处理异步)- 适合简单、规模不大的应用(redux约束强,更适合大型多人协作开发)......
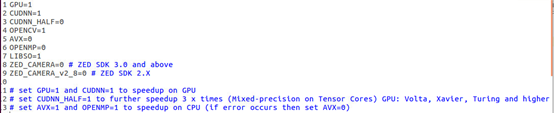
1、打开终端,克隆项目git clone https://github.com/AlexeyAB/darknet.git2、修改Makefile文件其中,GPU和CUDNN是GPU加速,CUDNN_HALF是特定硬件加速,OPENCV是否使用OpenCV,AVX和OPENMP是CPU加速3、编译cd darknetmake 或者 make -j8(加速编译)4、制作数据集制作数据集,进入桌面 “y
# 报错问题```cppffmpeg -i teaser.mov'ffmpeg' 不是内部或外部命令,也不是可运行的程序 或批处理文件。```这是因为电脑系统环境未配置ffmpeg# 解决方法下载ffmpeg软件包,并配置到系统环境中
行列与坐标系对应关系行rows:Y (height)列cols:X (width)其中OpenCV用的是cols(列数)和rows(行数)来表示图片的宽高Mat frame;cout<<"图片宽width为:"<<frame.rows<<endl;cout<<"图片高height为:"<<frame.cols<<endl;Re
FP32(Full Precise Float 32,单精度)占用4个字节,共32位,其中1位为符号位,8为指数位,23为尾数位。FP16(float,半精度)占用2个字节,共16位,其中1位为符号位,5位指数位,十位有效数字位。与FP32相比,FP16的访存消耗仅为1/2,也因此FP16是更适合在移动终端侧进行AI计算的数据格式。INT8,八位整型占用1个字节,INT8是一种定点计算方式,代表整
带Jetson nano/nx外出调试,还得配上显示器、键盘鼠标,实在不方便。所以希望用笔记本电脑连接nano/nx实现远程桌面控制,一共实现了三种连接方式:向日葵远程控制、VNC Viewer远程连接和Window10的远程桌面连接,其中第一种只需要保证nano/nx联网即可,后两种需要笔记本电脑用网线连接到nano/nx上解决了Desktop Sharing无法运行、ubuntu桌面管理环境
Jetson nano/nx使用麒麟arm版向日葵实现远程控制1、安装向日葵软件2、运行Sunlogin Client3、向日葵闪退问题4、重启系统5、重启后黑屏问题特别提醒:本博客的第3步切换桌面管理环境到lightdm,存在重启后开机黑屏的风险,我在自己的nano/nx上都没有问题,但帮一个同学的nx配置时,切换到lightdm,重启开机却出现了黑屏,所以执行第3步的话要有心理准备,黑屏解决方