
写文章




- @weixin_44884315
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
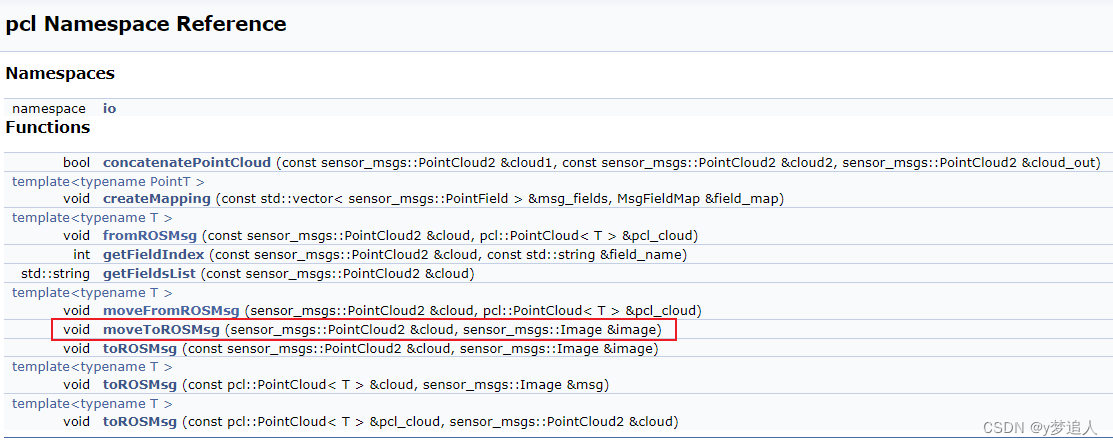
ROS点云类型sensor_msgs::PointCloud2与PCL的PointCloud<T>点云类型转换
ROS中sensor_msgs::PointCloud2类型定义;与PCL的PointCloud点云数据类型转换;moveFromROSMsg()函数解析;点云格式转换中的注意事项。
CMAKE编译慎用-march=native
在编译我的SLAM代码时,出现了 double free or corruption (out)的错误。一开始以为是内存泄漏,后面发现并非是代码错误,而是编译引起的错误。删除-march=native,重新编译,就没有问题了。当时为了程序运行的更块一点,就加了该指令,据了解,这个指令还有其他坑,慎用,慎用。
最小二乘、权、先验方差、后验方差
所以即使不同观测方程的单位不同,只需要考虑每个方程的观测值与权的单位一致即可。也无需考虑单位权的问题,单位权固定为1,此时,权为各自观测值方差的倒数。当有多种类型的观测值时,无需考虑不同类型观测方程之间的权重比,只需要考虑当前观测方程中观测值的先验方差σ,令方程的权为1/σ2。当先验方差未知时,可以先大致设置先验方差,用求得的后验方差作为先验方差,迭代求解,直至先验方差和后验方差的比值接近1.当先

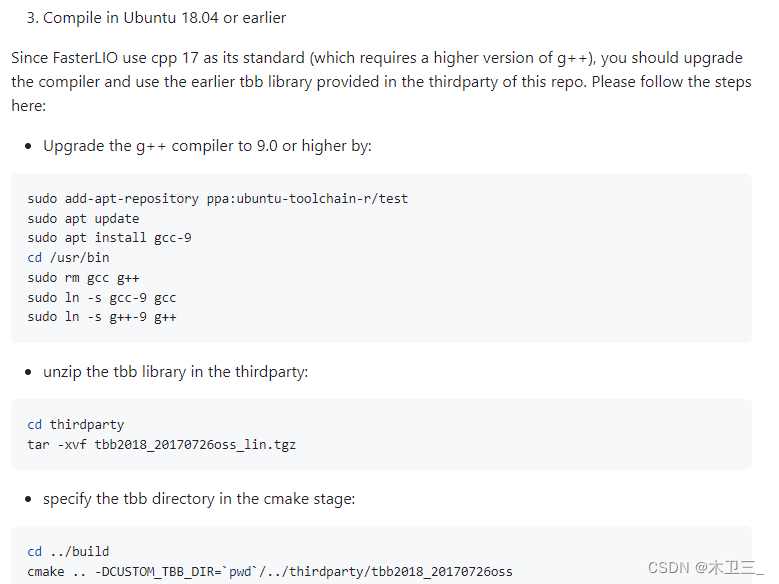
Ubuntu18.04 编译faster-lio,且不升级gcc/g++ 9.0版本(C++17)
faster-lio是高博开源的激光惯性里程计算法,提出一种增量式稀疏体素结构:iVox 。其使用了C++17的新特性,因此在编译时需要安装更高版本的gcc。对于Ubuntu18.04而言,gcc/g++版本是7.5.0,本文旨在解决在不升级gcc版本的情况下编译faster-lio的问题。
到底了