
写文章




- @weixin_44760904
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
5、闭环检测
闭环检测是SLAM系统中的一个关键步骤,通过识别和校正回环,可以显著提高地图的精度和一致性。它涉及特征提取、候选帧匹配、几何验证和全局优化等多个步骤,在各种SLAM系统中都得到了广泛应用。经典的实现如ORB-SLAM,通过高效的特征匹配和全局优化,实现了高精度的视觉SLAM。

2、紧耦合 vs 松耦合的区别
总结来说,紧耦合系统适用于对精度和鲁棒性要求较高的应用场景,但设计和实现复杂;松耦合系统实现较为简单,适用于对精度要求不太高或计算资源有限的场景。松耦合(Loosely Coupled)**是传感器数据融合的两种策略,主要用于提高SLAM系统的精度和可靠性。**紧耦合(Tightly Coupled)
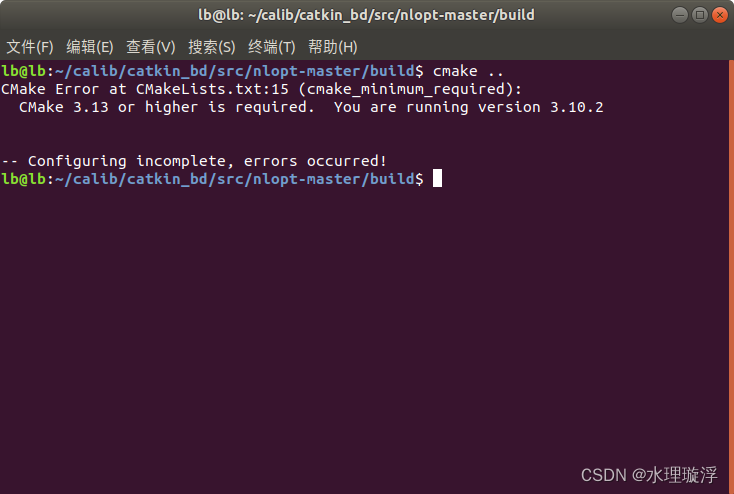
解决Cmake版本过低
等待结束,然后输入:sudo make install。提醒一下叉掉原来的终端,重新打开使用cmake ..使用命令 :cmake --version。下载后解压,运行./configure。按照提示,输入:make。
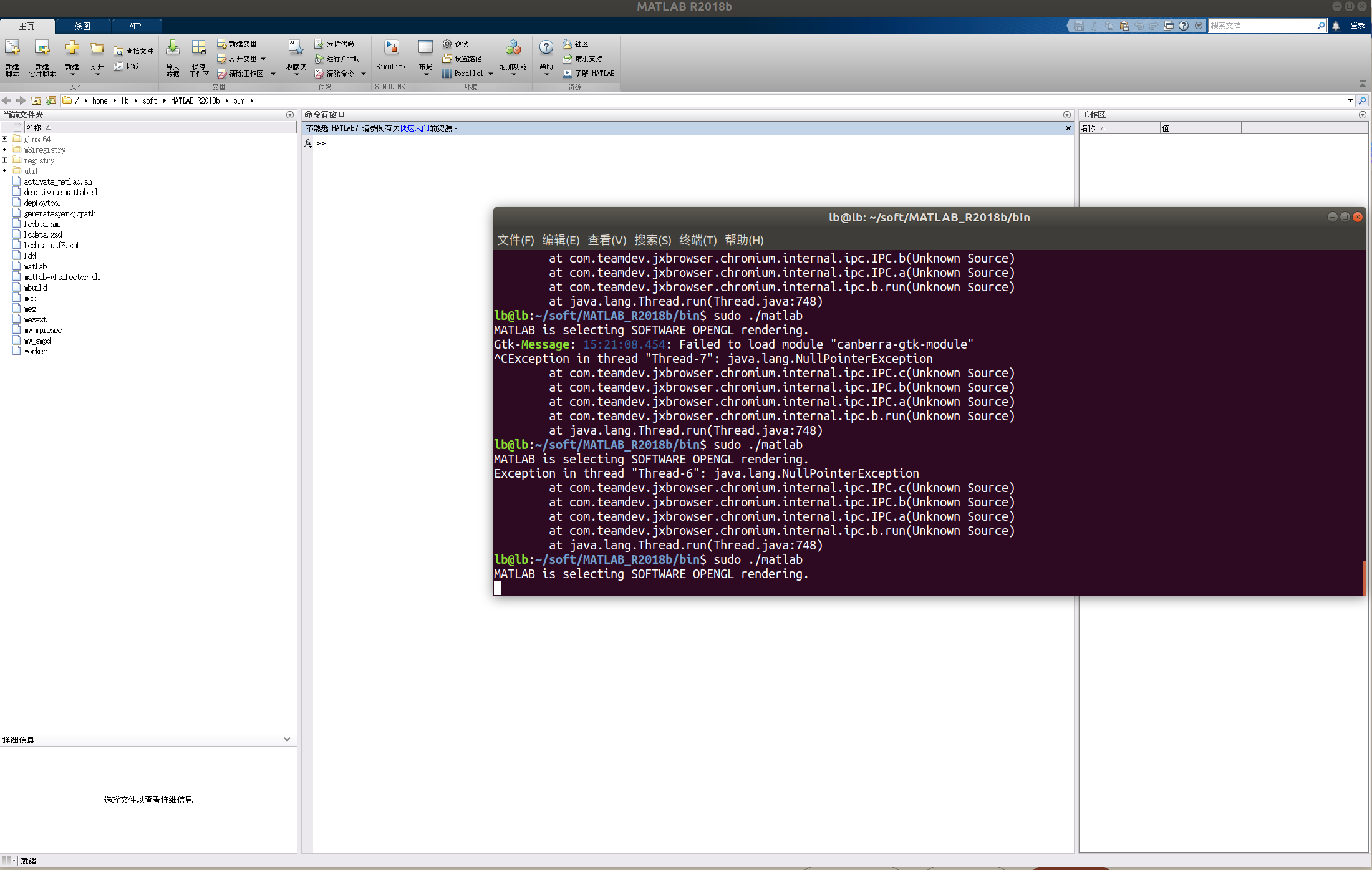
linux下安装MATLAB (各版本通用)
再次打开crack文件夹,依次打开bin\glnxa64\matlab_startup_plugins\lmgrimpl文件夹,复制其下的文件至安装目录的同名文件夹下。打开crack文件夹,复制其下的 license_standalone.lic文件至安装目录的licenses文件夹下。选择使用文件安装密钥,不停下一步,输入文件秘钥:09806-07443-53955-64350-21751-41
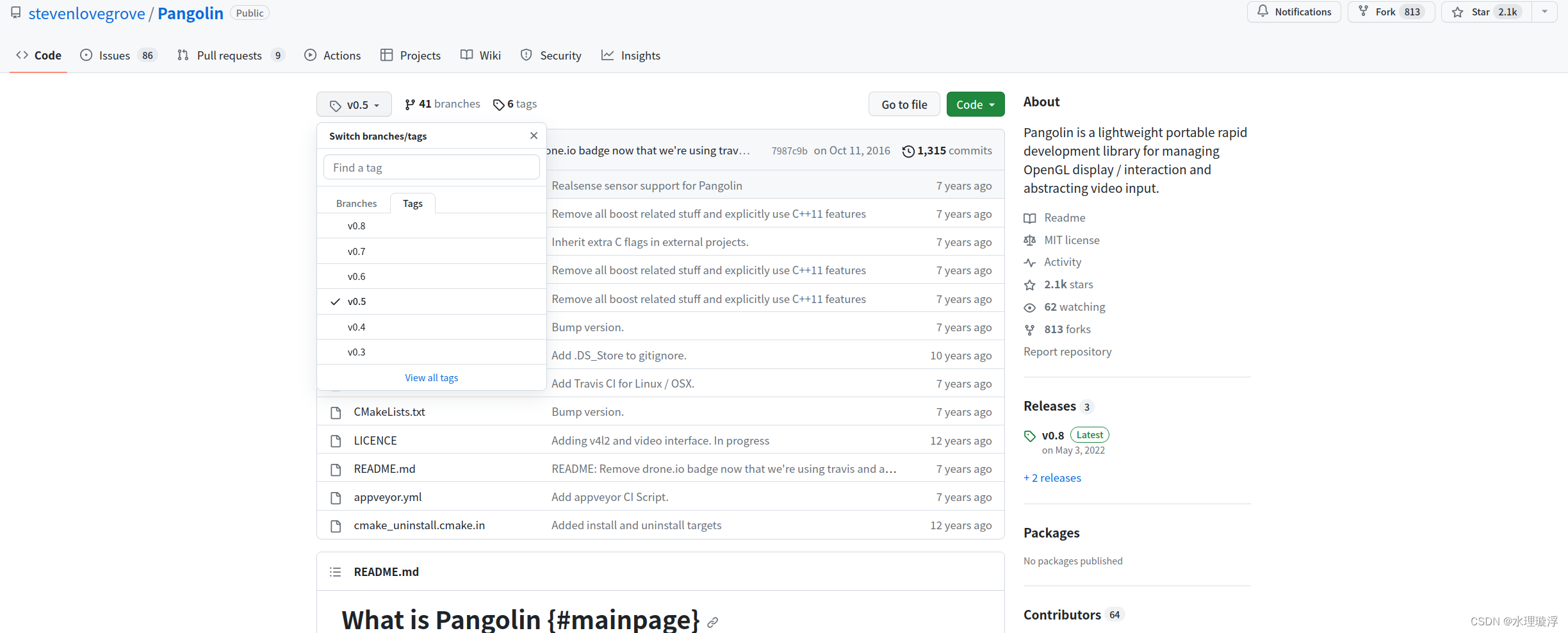
Ubuntu安装Pangolin0.5
使用时别忘记加#include 打开网址,确认是v0.5,点击code下载。在build文件夹下继续。
到底了