
写文章




- @weixin_44338714
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
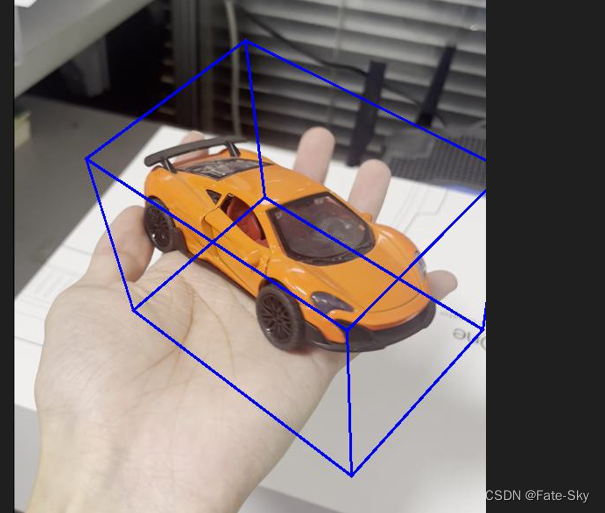
6D姿态估计算法汇总
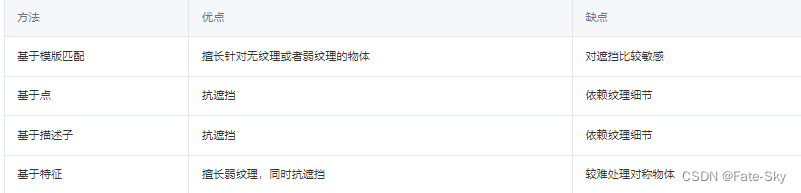
6D目标检测,和传统的目标检测类似,都是从图像(包括点云)中去识别物体的位置。传统的2D目标检测,像是SSD、YOLO等,识别的结果是一个边界框(bounding box)而3D目标检测的结果则是一个3D的边界框。6D目标检测的输出结果包括两个部分:物体的空间坐标:x, y, z物体的三个旋转角: pitch, yaw, roll传统的6D目标检测可以被分类成以下几种:基于模版匹配基于点基于描述子
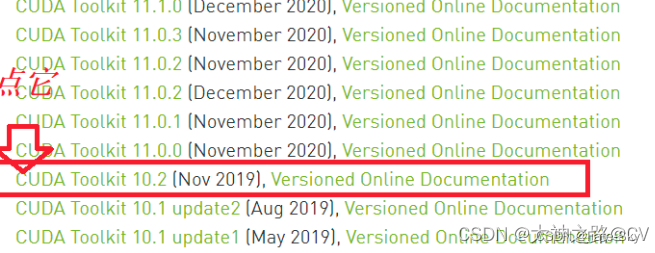
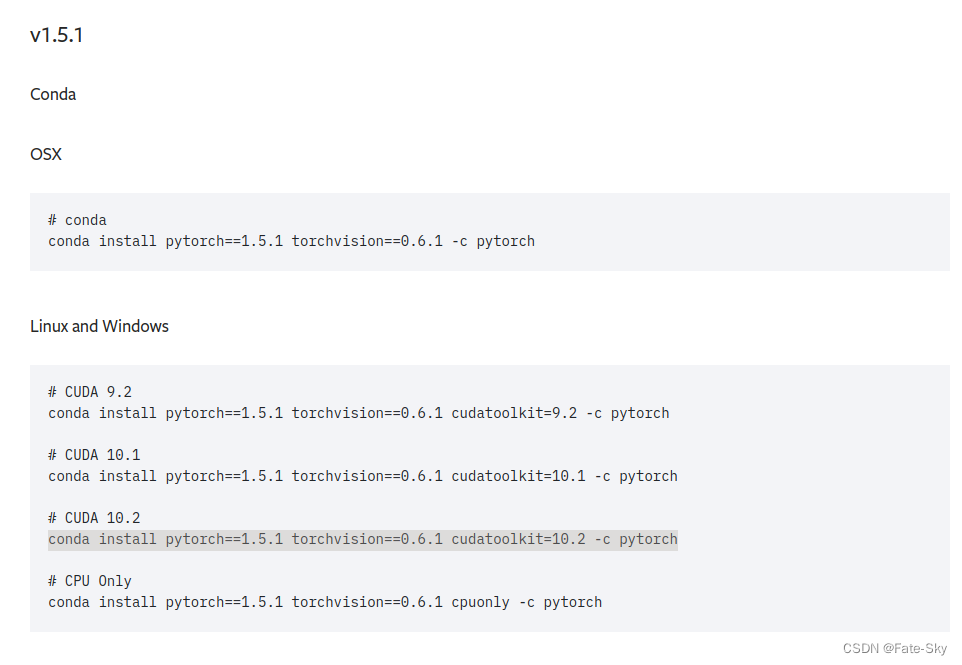
【从零开始复现PVnet】(上)搭建项目系统环境(CUDA+cuDNN+anaconda+pyCharm)
环境:显卡驱动版本:nvidia。
【从零开始复现PVnet】(下)复现PVNet
环境:显卡驱动版本:nvidia-driver-470。
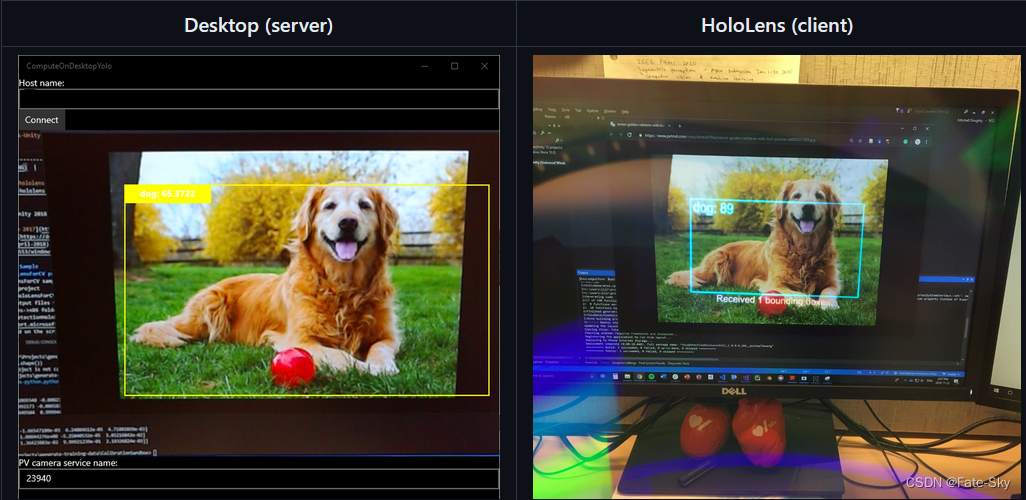
【Hololens2目标检测】YoloDetectionHoloLens-Unity项目发布记录
这是一个使用Hololens进行目标检测的项目。Hololens端负责采集和显示,电脑端处理图像,并标注,将标注框传回Holo端进行显示。具体的项目发布流程,在项目中都有介绍,这篇文章主要记录一下作者没有提到的具体步骤和我在发布过程中遇到的错误,和解决方案。
6D姿态估计网络【Gen6D复现】CUDA11.3+cuDNN8.2.1
主要记录一下复现Gen6D的大概过程,以及在其中遇到的一些bug,主要参考了博主。
到底了