




- @weixin_43980550
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
DETR提出一个简洁的pipeline,无需先验知识、手工操作,通过transformer编解码结构和二分图匹配优化,直接得到目标检测框和类别。开启transformer目标检测新范式!

计算机视觉之数学篇,重点讲述数字图像的本质,高等数学矩阵运算和线性代数
Anaconda 环境混乱:源 404、Python 版本混杂、与 ROS 库冲突权限与路径污染--user安装导致包路径混乱,优先加载系统旧库依赖爆炸:自动安装 TensorFlow 2.8.0,依赖已下架的Protobuf 版本错误:系统旧版缺少builder模块,导入 ONNX 失败虚拟环境缺失:Ubuntu 默认未安装,无法创建环境环境必须隔离,不与 ROS/Anaconda 混用依赖最小
RKNN Toolkit Lite2是瑞芯微NPU平台板端部署RKNN模型的轻量级Python工具,适配RK356x/RK3588等板卡。摘要说明其核心功能:1) 作为板端专用部署工具,与PC端RKNN Toolkit2分工明确;2) 提供5步标准部署流程:创建对象→导入匹配模型→初始化环境→推理处理→释放资源;3) 关键注意事项包括平台匹配、依赖库管理和环境适配。文中包含完整YOLOv5部署示例
PointPillar将三维点云分为一些柱体pillars,利用PointNet提取柱体pilars特征,将特征映射为2D伪图像,对2D图像使用SSD提取目标检测框和类别,速度与精度实现SOTA!工业界已大量部署!
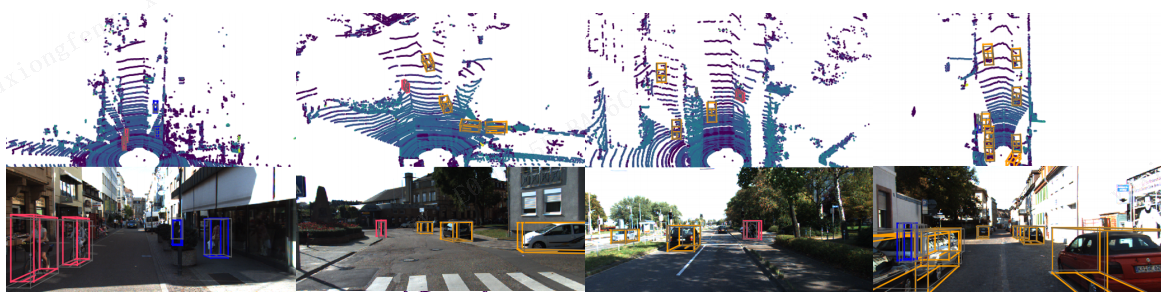
DETR提出一个简洁的pipeline,无需先验知识、手工操作,通过transformer编解码结构和二分图匹配优化,直接得到目标检测框和类别。开启transformer目标检测新范式!
PointPillar将三维点云分为一些柱体pillars,利用PointNet提取柱体pilars特征,将特征映射为2D伪图像,对2D图像使用SSD提取目标检测框和类别,速度与精度实现SOTA!工业界已大量部署!
DETR提出一个简洁的pipeline,无需先验知识、手工操作,通过transformer编解码结构和二分图匹配优化,直接得到目标检测框和类别。开启transformer目标检测新范式!