




- @weixin_43802726
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
论文:https://github.com/gaoxiang12/faster-lio/blob/main/doc/faster-lio.pdf。如无法下载,可以尝试 gitee 版:https://gitee.com/sun_6s/FAST_LIO。是在 FastLIO2 基础上开发的,速度提高了 1.5-2 倍左右。打开/fastlio_ws/src/FAST_LIO/config/velod
对流层延迟是信号穿过对流层时,受到大气折射的影响而产生的延迟,它与大气的温度、湿度和压力等因素有关,可以通过模型进行修正。激光扫描技术可以快速获取周围环境的三维点云数据,通过与RTK定位数据的融合,可以实现更精准的环境建模和定位。SLAM技术可以在没有先验地图的情况下,实时构建环境地图并确定自身位置,与RTK技术融合后,可以在卫星信号遮挡的环境中(如城市峡谷、森林等)实现连续定位。计算机视觉技术可

slam的落地场景难点通常有,弱光照或黑暗场景,对于这种场景基于特征点法的方法失效,开阔地带或广场,对于这种场景2d 3d激光方法失效因为其传感器有极限距离,高低起伏地面场景2d激光失效无法扫描不同的平面,室内与室外场景,室内适合2d,室外适合惯性导航和uwb导航,传感器硬件成本3d多线激光雷达成本太高,相比之下面阵tof具有优势,软件部署成本(包括算力,算法成熟度,可移植性),大多开源算法都比较
NDT将根据点云中点所处的位置,对整个点云利用一个正态分布函数来表示。再用拟合函数来进行配准,点集配准的目标是用两个点集数据来恢复这些参数,具体步骤如下: 1)构建第一次扫描点集(即目标点集)的NDT;3)对于第二次扫描(即变换集)的每个样本:根据参数将2D点集映射到第一次扫描点集的坐标系中;5)通过评估变换集映射点的分布并对结果求和来确定参数的分数;NDT是将单个扫描的离散点集转换为空间上定义的

整,使其更好地适配具体任务。LoRA(Low-Rank Adaptation)是一种旨在微调大型预训练语言模型(如 GPT-3 或 BERT)的技术。P-Tuning v2 是 P-Tuning 的进一步改进版,在 P-Tuning 中,连续提示被插入到输入序列的嵌入层。例如,对于需要细粒度控制的复杂任务,P-Tuning v2 或 LSTM 基础的 P-Tuning 可能更适合。Transfor
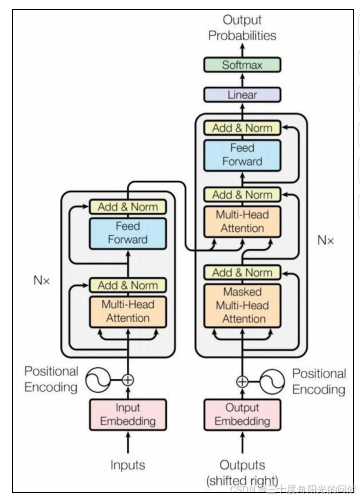
整,使其更好地适配具体任务。LoRA(Low-Rank Adaptation)是一种旨在微调大型预训练语言模型(如 GPT-3 或 BERT)的技术。P-Tuning v2 是 P-Tuning 的进一步改进版,在 P-Tuning 中,连续提示被插入到输入序列的嵌入层。例如,对于需要细粒度控制的复杂任务,P-Tuning v2 或 LSTM 基础的 P-Tuning 可能更适合。Transfor
环境感知与导航定位是自动驾驶的核心技术,这一层的主要功能和目的是利用激光、毫米波、超声波雷达、摄像头等车载传感器和通过车联网获取的多源数据,为车辆提供规划决策所需的必要条件。环境感知是无人驾驶的重要组成部分。通过传感器,采集周边和自身信息,实时发送给处理器,识别周边的车辆、障碍物、行人、可行使区域和交通规则等各种路况信息,确保自动驾驶汽车对环境的理解和把握。智能网联就是指车联网与单车智能的有机联合
其工作原理是,首先进行手动建图,app上进入建图模式,手动模式推动机器对整个场景进行建图,边走边建图,可以app实时查看建图效果,看是否有叠图歪图现象,同时app上也可以远程遥控控制小车进行行走建图。地图建完后,可以在线用app修改地图添加虚拟墙,擦除错误地图点,也可以离线修改地图。之后可以选择清扫区域,执行清扫任务,机器会自动规划清扫路线,清扫的同时可以执行避障功能,临时规划避障路线。底部有防撞

机器人仿真