
写文章




- @weixin_43412762
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
(搜索) 剑指 Offer 13. 机器人的运动范围 ——【Leetcode每日一题】
剑指 Offer 13. 机器人的运动范围地上有一个m行n列的方格,从坐标 [0,0] 到坐标 [m-1,n-1] 。一个机器人从坐标 [0, 0] 的格子开始移动,它每次可以向左、右、上、下移动一格(不能移动到方格外),也不能进入行坐标和列坐标的数位之和大于k的格子。例如,当k为18时,机器人能够进入方格 [35, 37] ,因为3+5+3+7=18。但它不能进入方格 [35, 38],因为3+

查看占用GPU资源的 进程所属docker容器,并杀死 docker 中的僵尸进程!
一台服务器,每个人在上面run一个容器,跑各自的代码,虽然通过nvidia-smi可以看到每个进程占用的GPU,但是不好找进程对应的容器id,就没法确认到底是谁占用了较多GPU。
【root is not a leaf queue】 org.apache.hadoop.yarn.exceptions.YarnException: Failed to submit appli..
【root is not a leaf queue】org.apache.hadoop.yarn.exceptions.YarnException: Failed to submit application_1680768899138_0002 to YARN : root is not a leaf queue

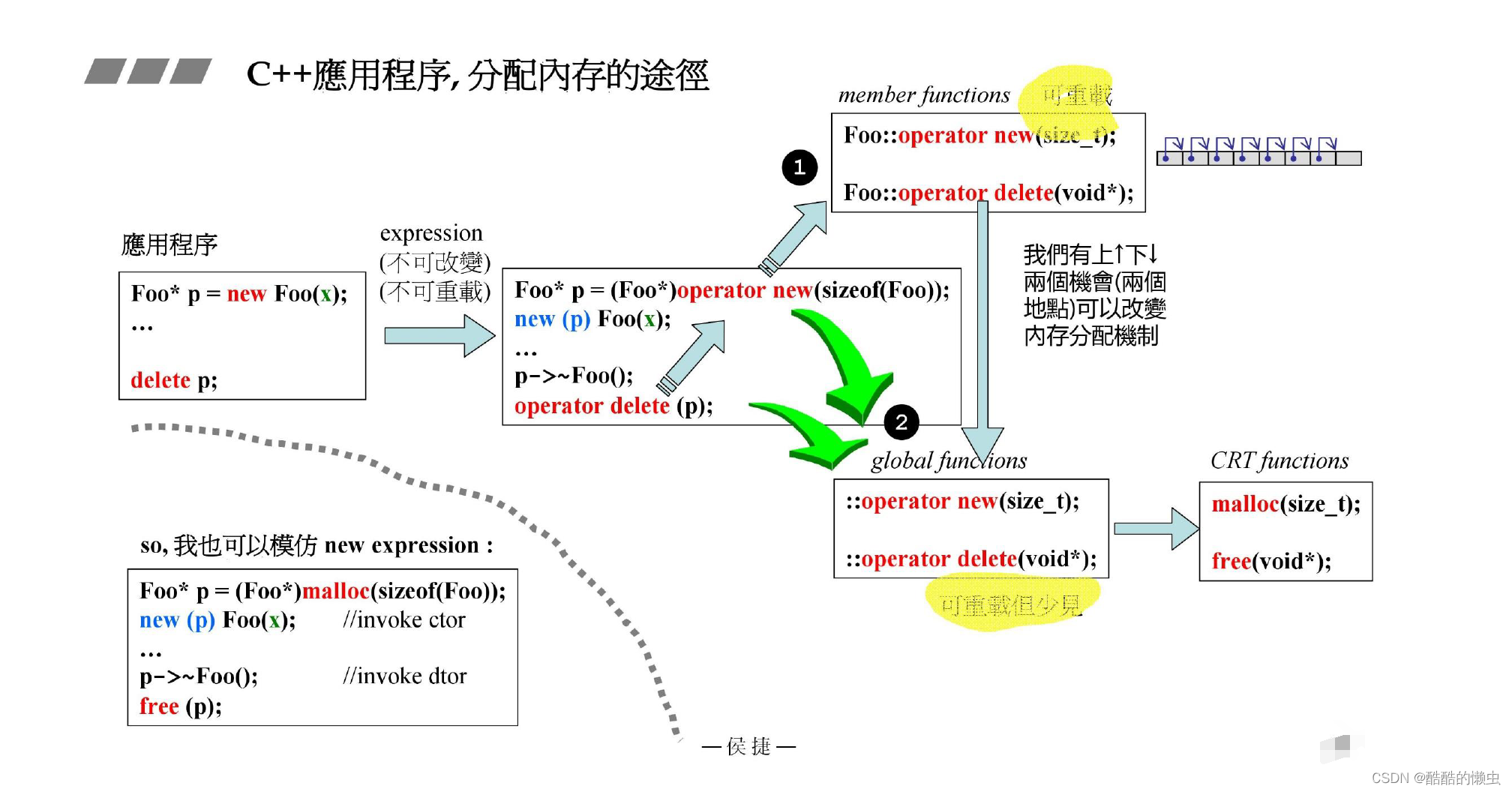
五、C++内存管理机制 —— 分配器allocator(侯捷)
五、C++内存管理机制 —— 分配器allocator(侯捷)
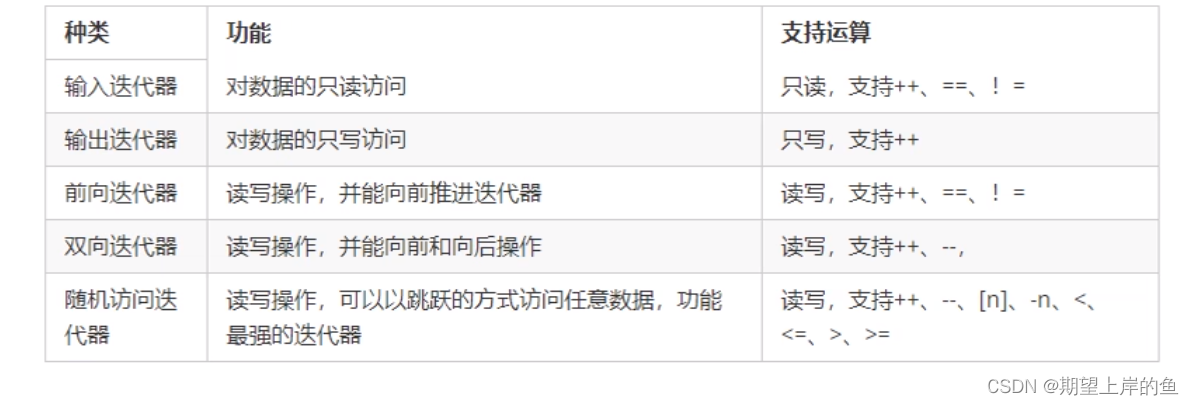
C++ , STL ---- 常用容器
STL初识,STL常用容器
到底了