- @weixin_42491720
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
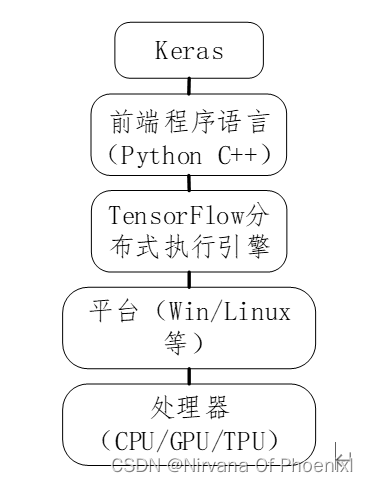
本文主要是基于TensorFlow和Keras框架实现的鸢尾花分类,主要包含关于深度学习TensorFlow-GPU环境的搭建,以及实现框架的实现,其实验目的是实现鸢尾花分类,本质是通过简单的实践理解深度学习基本流程,加深对于代码实现的理解,通过对框架中的参数修改和完善理解调参对于框架识别精度的影响。最终目标是熟悉包括软件安装在内的深度学习环境的搭建、框架的构建、参数的调整做一个系统的学习和理解。
D-H建模原理推导1.1 基本思路D-H建模具体思路是先分别在每个关节加建立关节坐标系,确定关节刚性连杆参数,再依次将关节变换联系起来,计算出末端执行器相对于参考坐标系的变换关系得到坐标变换矩阵,从而建立机械臂运动学方程。关于D-H建模首先要会以下知识:(1)会齐次坐标的变换。(2)知道D-H建模中 分别对应连杆的什么地方。(3)对已知连杆机构,会列DH参数表。...
工业机器人的运动模型建立,关于坐标变换系的关系以及变换矩阵的推导。
D-H建模原理推导1.1 基本思路D-H建模具体思路是先分别在每个关节加建立关节坐标系,确定关节刚性连杆参数,再依次将关节变换联系起来,计算出末端执行器相对于参考坐标系的变换关系得到坐标变换矩阵,从而建立机械臂运动学方程。关于D-H建模首先要会以下知识:(1)会齐次坐标的变换。(2)知道D-H建模中 分别对应连杆的什么地方。(3)对已知连杆机构,会列DH参数表。...
D-H建模原理推导1.1 基本思路D-H建模具体思路是先分别在每个关节加建立关节坐标系,确定关节刚性连杆参数,再依次将关节变换联系起来,计算出末端执行器相对于参考坐标系的变换关系得到坐标变换矩阵,从而建立机械臂运动学方程。关于D-H建模首先要会以下知识:(1)会齐次坐标的变换。(2)知道D-H建模中 分别对应连杆的什么地方。(3)对已知连杆机构,会列DH参数表。...
虚拟机安装Ubuntu18.04换源问题!第一步:最重要的就是换源:目的加快下载速度!备份原来的文件cd /etc/aptcp sources.list sources.bak第二步:编辑/etc/apt/sources.list文件可以换的源有可选的几种,随便选一个就OK啦#阿里源deb http://mirrors.aliyun.com/ubuntu/ bionic-security main
虚拟机安装Ubuntu解决自带Firefox浏览器不能看视频,提示无Flash插件问题!安装flash!本人通过这个一次性解决问题,拿到乌班图第一件事就是换源记住换源!!然后在搞其他的,解决看视频问题缺少插件必须换源!打开终端输入更新:sudo apt-get updatesudo apt-get update在输入sudo apt-get install flashplugin-nonfree,
解决虚拟机安装Ubuntu18.4界面太小,无法全屏显示问题!!第一步:在虚拟机上框栏选择【虚拟机】,找到【安装虚拟机VMware tools】在桌面会出现一个类似光盘图标的VMware tools文件第二步:双击打开此文件,进入DVD目录会看到一个VMware tools.文件类型是一个tar.gz的压缩包第三步:将这个压缩包提取到(解压到)下载或者你Ubuntu的本机目录下即可:第四步:进入解
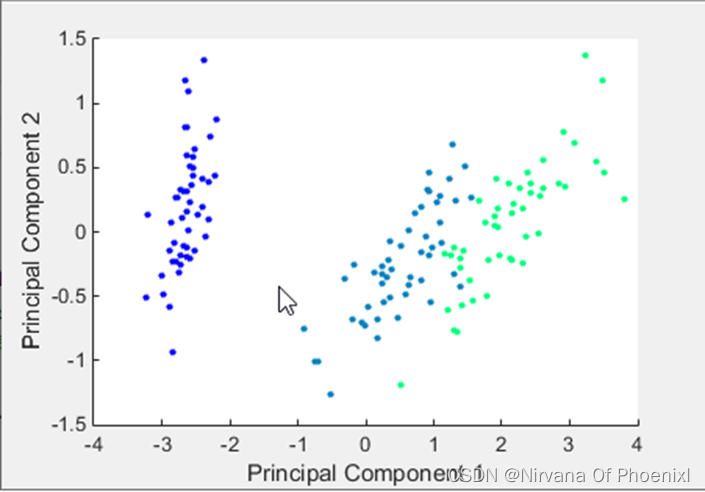
主成分分析(PCA)是一种能够极大提升无监督特征学习速度的数据降维算法。主成分分析(Principal Component Analysis,PCA)的方法,可以将具有多个观测变量的高维数据集降维,使人们可以从事物之间错综复杂的关系中找出一些主要的方面,从而能更加有效地利用大量统计数据进行定量分析,并可以更好地由于得到协方差矩阵的特征值特征向量有两种方法:特征值分解协方差矩阵、奇异值分解协方差矩阵