




- @weixin_39258979
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
通过模拟组件及控制程序创建机器人或系统完整虚拟模型极大程度影响了项目总体的效率。每一个可以被模拟的区域的详细及准确程度无疑会影响整个项目周期及成本。一、 仿真的好处降低机器人生产成本判断源代码所控制的资源(是否正确)模拟多种替代方案而无需物理成本机器人或者组件能够在部署前被提前验证仿真能够在方案设计阶段完成,适合多个项目协作展示系统判断是否可行仿真兼容多种语言更短的交付时间(Delivery ti
旋转矩阵是描述坐标系的一种方式,那么还有没有其他描述方法呢?本文将会介绍以下内容:欧拉角、等效轴角、旋转矩阵和四元数的定义及其优缺点Eigen库是如何完成这些转换的一、旋转矩阵选定参考坐标系后,旋转矩阵的三个主轴分别向参考坐标三个主轴投影共计九个标量按照一定规则排列而成的3×33\times33×3矩阵称为旋转矩阵。其一般形式为:R=[nxoxaxnyoyaynzozaz]R=\begin{bma
一、什么是Scara机器人?SCARA是Selective Compliance Assembly Robot Arm的缩写,意思是一种应用于装配作业的机器人手臂。它有3个旋转关节,最适用于平面定位。[1]这种机器人的结构是RRPR,三个旋转轴加上一个移动轴。[1]https://baike.baidu.com/item/SCARA/5158742?fr=aladdin...
一、Numpy是什么Numpy代表"Numerical Python’,那么Numpy是什么呢?Numpy是一个python的数字库NumPy包含多维数组和矩阵数据结构数组结构支持与三角、统计、和线性代数相关的大部分函数。Numeric和Nuarray的扩展Numpy包含随机数发生器Numpy使用C语言实现和封装Pandas对象是建立在Numpy基础上的,实现了对Numpy的扩展Scipy(Sci
一、曲线的参数方程1.1 参数方程的概念一般地,在平面直角坐标系中,如果曲线上任意一点的坐标x,yx,yx,y都是某个变数ttt的函数{x=f(t)y=g(t)(1)\left\{\begin{aligned}&x=f(t)\\&y=g(t)\end{aligned}\right.\tag{1}{x=f(t)y=g(t)(1)并且对于每个ttt的允许值,由方程组(1)所确定的点
一种传送带跟踪实现方法。
本文首先翻译了VSCODE官方文档对Task描述,然后通过C/C++的例子来说明自动化工具在VSCODE中的体现,最后介绍了如何配置Task,完成C/C++的编译任务。一、官方文档关于Task的描述自动化任务工具在linting(代码校验)、building(编译)、packaging(打包)、testing(测试)或者部署(部署)广泛的存在于工程实践中,如:TypeScript(编译器),ESL
数是按字节存储的十进制数4660是如何在计算机内存中存储的?我们知道计算机存储的单元是字节,4460转换成十六进制,一共有四字节,因为char arr[] = { 0x12,0x34 };std::cout << "Big Endian will be:";std::cout << ((0x34 << 8) + 0x12) << std::endl;
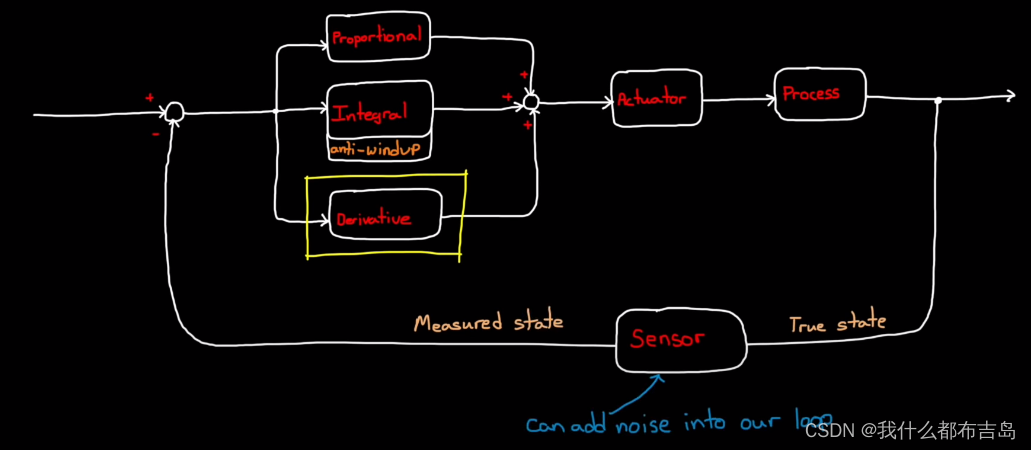
在前面的章节里,我们谈到了积分环节由于执行器的物理限制导致的积分项Wind-up,通过设置饱和限幅器,选择性关闭积分环节来完成Wind-up问题。今天我们要解决的问题就是微分环节可能存在的问题。通过传感器我们可以观测出一个被控量的大小,和前面说到的anti-windup一样,受到物理环境的限制,对于传感器而言,那就是噪声。我们知道微分环节其实就是对误差的一个求导,几何意义就是斜率,斜率越大,表示控
一、设置1.1 用户设置和工作区设置用户设置(User Setting): 所有VSCODE实例都有效的设置;工作区设置(Workspace Setting):当前工作区有效的设置。工作区设置可以上传到服务器上方便所有成员共享。1.2 打开设置VSCODE有途径进行VSCODE设置,分别是JSON和UI方式。那么如何打开JSON或UI进行设置呢?菜单栏选取。FIle-Preference-Sett