



- @u014374826
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
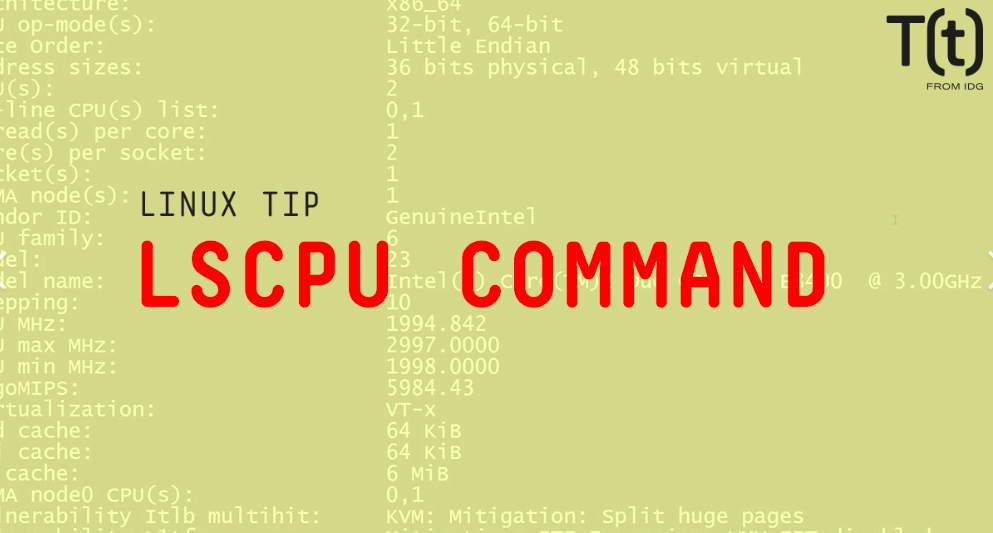
Ubuntu中查看电脑有多少个核——lscpu
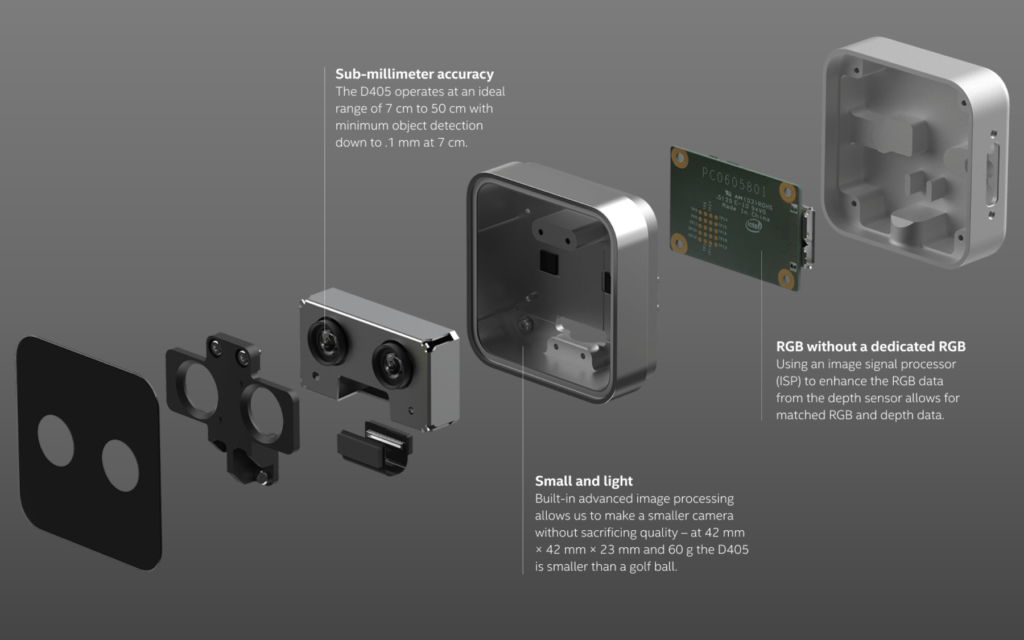
ROS是一种流行的机器人操作系统,Intel® RealSense™是一种深度摄像头,可以用于实现各种视觉应用程序,例如SLAM(同时定位与地图构建)、人体姿态估计和物体识别等。这个ROS包提供了一种简单的方式来将Intel® RealSense™摄像头集成到ROS机器人系统中。它包括一个ROS节点,该节点将数据从摄像头读取并发布到ROS话题上。通过使用这些话题,其他ROS节点可以订阅摄像头数据并
【代码】PCL可视化 3D点云PCD文件。

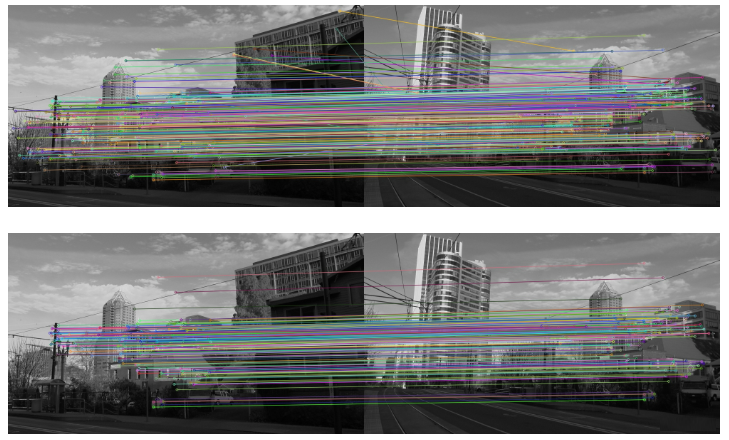
在一组含有”外点”的数据中,不断迭代,最终正确估计出最优参数模型的算法。其中内点是符合最优参数模型的点,反之为外点。外点是一般指的数据中的噪声或无效点,比如说匹配中的误匹配和估计曲线中的离群点。所以也属于一种外点检测算法。目的:为提高(点)特征的匹配率,提出剔除误匹配对,在特征匹配中,是为了寻找最佳的匹配模型。
用粒子来描述鸟类个体,每个粒子在搜索空间中搜索,飞行过程为搜索过程,飞行速度可以根据粒子历史最优位置和种群历史最优位置动态调整,粒子当前位置就是对应优化问题的一个候选解 ,称为个体极值,粒子群中的最优的个体极值称为全局最优解。不断地迭代,粒子更新速度和我位置,最终满足条件的全局最优解即为所求目标。
当新建好一个VM的虚拟机之后,上网时会发现网速非常的慢,下载东西非常不方便。为了解决此类问题,看了网上的一些方法,简单做个总结。1)如图,新建好的虚拟机默认网络适配器一般使用的是 NAT,我们要对此处进行修改双击网络适配器打开设置界面,或点击上方的编辑虚拟机设置。3)打开网络连接下方的高级选项,对图中两处传入传输和传出传输的带宽设置为不受限。4)退回到原界面确认修改结果是否成功。当显示为桥接模式表

当新建好一个VM的虚拟机之后,上网时会发现网速非常的慢,下载东西非常不方便。为了解决此类问题,看了网上的一些方法,简单做个总结。1)如图,新建好的虚拟机默认网络适配器一般使用的是 NAT,我们要对此处进行修改双击网络适配器打开设置界面,或点击上方的编辑虚拟机设置。3)打开网络连接下方的高级选项,对图中两处传入传输和传出传输的带宽设置为不受限。4)退回到原界面确认修改结果是否成功。当显示为桥接模式表