- @tywwwww
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
里面有相关算法的去雾效果比较主要=环节,大气光估计,透射率粗估计只估计一个数,引导滤波精估计,gamma增强,根据估计进行去雾6. 一个比较清晰的代码:https://github.com/Accustomer/TheThingsWithImage/tree/main/Code/6_OCEDehazing7. https://www.cnblogs.com/Imageshop/p/3925461.
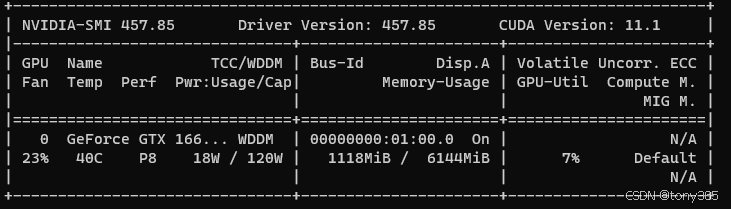
首先DataParallel是单进程多线程的方法,并且仅能工作在单机多卡的情况。而DistributedDataParallel方法是多进程,多线程的,并且适用与单机多卡和多机多卡的情况。当我们的服务器上有多个GPU,我们应该指明我们使用的GPU是哪一块,如果我们不设置的话,tensor.cuda()方法会默认将tensor保存到第一块GPU上,等价于tensor.cuda(0),这将会导致爆出o
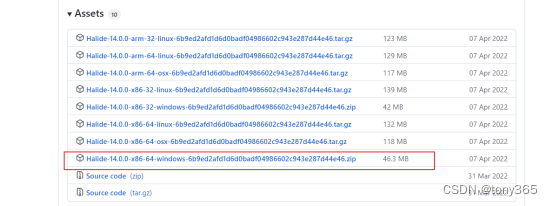
Halide 配置 visual studioHalide是一种编程语言,使得在现代机器上编写高性能图像和数组处理代码更加容易。Halide支持如下的平台:CPU体系结构:X86,ARM,MIPS,Hexagon,PowerPC操作系统:Linux,Windows,macOS,Android,iOS,Qualcomm QuRTGPU计算API:CUDA,OpenCL,OpenGL,OpenGL计算
手机上的光圈是固定的,所以只需考虑曝光时间和ISO(也就是Gain值的一种表示,这里的Gain又分为Analog Gain,Digital Gain,ISO指的是analog gain)。而手机上的自动曝光就是让相机根据当前的图像信息自动配置曝光大小,也就是曝光时间和ISO的值。参考:https://blog.csdn.net/NCU_wander/article/details/12652172

【代码】强化学习 PPO代码。
里面有相关算法的去雾效果比较主要=环节,大气光估计,透射率粗估计只估计一个数,引导滤波精估计,gamma增强,根据估计进行去雾6. 一个比较清晰的代码:https://github.com/Accustomer/TheThingsWithImage/tree/main/Code/6_OCEDehazing7. https://www.cnblogs.com/Imageshop/p/3925461.
特别是 OpenCL 为应用程序提供了对 GPU 的访问,在计算机视觉中,许多算法可以在 GPU 上比在 CPU 上更有效地运行:例如 图像处理、矩阵运算、计算摄影、物体检测等。当选择忽略这些#pragma,或者编译器不支持OpenMP时,程序又可退化为通常的程序(一般为串行),代码仍然可以正常运作,只是不能利用多线程来加速程序执行。程序员通过在源代码中加入专用的#pragma来指明自己的意图,由
在dataset中,会将数据从磁盘读入内存中,如果启用了dataloader中的pin_memory,就会让数据常驻内存,同时设置num_workers还能实现多进程读取数据,但即使设置了这些,数据加载速度依然没有质的提升。数据读取的速度远远大于GPU训练的速度,导致整个训练流程中有大部分时间都在等待数据发送到GPU,在资源管理器中呈现出CUDA使用率周期性波动,且大部分时间都是在等待数据加载。如

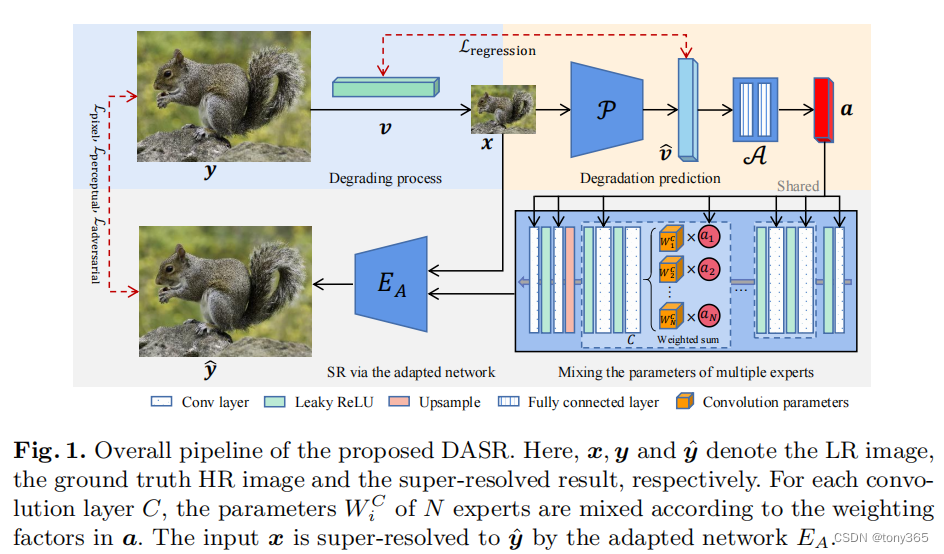
在DASRDataset只是计算blur kernel, 而 blur退化的执行, 以及 resize, noise, jpeg compress等退化的执行是在 DASRModel 类中的 feed_data 函数中。degradation_params是一个33dim的向量,也是退化预测网络中回归损失函数的 gt.主要分为3个强度的退化空间,在处理数据集的时候,应用的概率分别是。对判别器有个大