




- @suyong_yq
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于Windows系统搭建micropython原生开发环境苏勇,suyong_yq@126.com,2021-01文章目录基于Windows系统搭建micropython原生开发环境引言下载资料安装msys2在msys2中安装make工具在msys2中安装gcc编译器在msys2中安装python3在msys2中安装arm-gcc-none-eabi编译器编译micropython中的minim
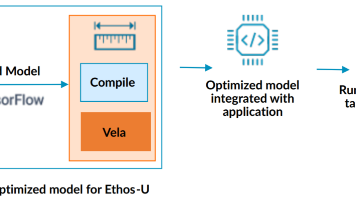
使用Arm发布的Vela编译器,开发Arm Cortex-M处理器平台集成的Ethos-U NPU的过程。简要介绍开发流程,使用工具的基本操作。引言。
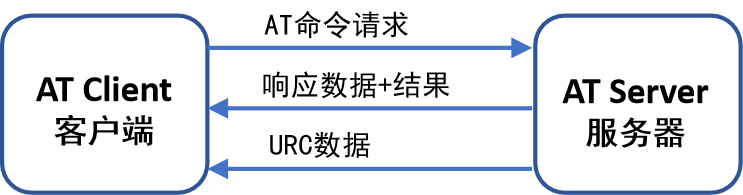
MindSDK中的`at-server`组件,应用逻辑还是相当清晰的,抽象出了绑定硬件的函数对象、命令集等,自定义命令和注册回调函数也非常方便。at-server对于小资源微控制器来说,可是个福音,在基于主从机交互的应用环境中,将微控制器作为一个仅连接电路系统的控制器,解析并执行来自主机的命令,将大算力和大存储需求的算法和应用逻辑转移到主机(PC机)上。如此以来,不通硬件和不愿意看微控制器开发手册
使用Arm发布的Vela编译器,开发Arm Cortex-M处理器平台集成的Ethos-U NPU的过程。简要介绍开发流程,使用工具的基本操作。引言。
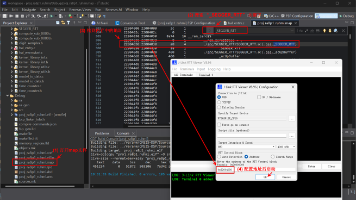
本节仍以 RA8P1 和本文中 的 `minst.tflite`模型文件为例,说明仅使用 CPU 执行推理的源码工程开发过程,并通过实测的数据展现 NPU 加持算力的加速效果。
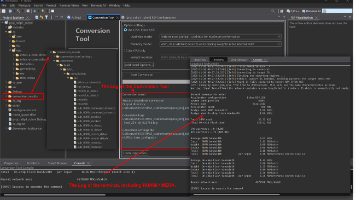
在本节中,将通过 AI Navigator 的图形界面调用RUHMI工具,转换预先准备好的模型文件minst_quant.tflite,生成可以调用 Ethus-U NPU硬件引擎计算神经网络推理过程的 C 源码。
本文讲述基于Windows操作系统,搭建`armgcc`编译环境,并支持编译灵动微电子官方软件开发平台的MindSDK样例工程。

在本文中介绍了嵌入式实时操作系统MQX-Lite的调度核心实现代码——dispatch.s文件,并对其中调度过程中执行上下文切换的流程与全功能版MQX进行了比较和细致的分析,特别考虑了从中断返回和从调度返回两种情况。详细说明了调度器实现的原理,这对于设计实现RTOS内核具有极大的参考价值。当然,后续的解析工作仍将继续,笔者讲通过分析源码,逐渐绘制出MQX-Lite系统的全貌。紧接着的还有在disp
基于Windows系统搭建micropython原生开发环境苏勇,suyong_yq@126.com,2021-01文章目录基于Windows系统搭建micropython原生开发环境引言下载资料安装msys2在msys2中安装make工具在msys2中安装gcc编译器在msys2中安装python3在msys2中安装arm-gcc-none-eabi编译器编译micropython中的minim