- @qq_52785580
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
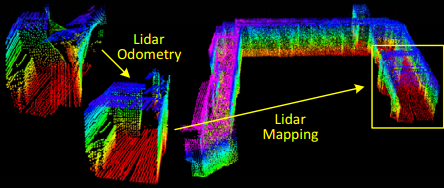
本系列文章将对LOAM源代码进行讲解,在讲解过程中,涉及到论文中提到的部分,会结合论文以及我自己的理解进行解读,尤其是对于其中坐标变换的部分,将会进行详细的讲解。本来是懒得写的,一个是怕自己以后忘了,另外是我在学习过程中,其实没有感觉哪一个博主能讲解的通篇都能让我很明白,特别
基于MATLAB的数字图像处理的第二章·视觉系统与图像处理系统的相关笔记及知识点整理
使用到的数据结构数组、栈、队列、图使用到的算法Dijkstra算法、Floyd算法、快速排序实现的功能验证武汉中心地位,即显示从武汉到我国34个省份的省会的中转次数(港澳台除外)使用Dijkstra算法计算两城市间的最短距离及路过的城市,可以选择绕过中间某个城市使用Floyd算法计算两城市间的最短距离及路过的城市,可以选择绕过中间某个城市按照降序排列输出两城市间的所有路径到文件path_data中

全覆盖路径规划(complete coverage path planning, CCPP)问题的任务是确定一条路径,该路径在避开障碍物的情况下通过一个区域或一定空间范围内的所有点。Choset根据环境地图是否先验已知,将全覆盖路径规划算法分为“在线式”和“离线式”两类。离线式CCPP算法只依赖于静态环境信息,并且假设环境是先验已知的。然而,在许多情况下,假设对环境有充分的先验知识可能是不现实的。

本文介绍了基于误差状态卡尔曼滤波(ESKF)的IMU与GPS融合定位方法。首先阐述了IMU测量模型和航迹推算原理,包括加速度/角速度测量公式和积分方法。其次概述了GPS定位的精度影响因素及常见坐标系转换。重点推导了ESKF算法的实现过程,包括名义状态变量与误差状态变量的定义、运动方程建立等关键步骤。该方法将IMU的高频局部定位与GPS的低频绝对定位相结合,通过分离状态传播与噪声处理,简化了计算过程
ROS中级操作学习笔记,gazebo的机器人描述格式和简单的一些操作
本文介绍了5中ROS中常见的激光SLAM建图方法,其中最为常用的是gmapping_slam,另外,我们在激光SLAM使用讲解过程中,一并对如何保存地图、加载地图、地图数据格式进行了简要说明,这涉及到一个重要节点map_server。另外,虽然我们对这些算法的原理和参数没有进行详尽的说明,但我们在文章目录前言一、gmapping二、hector三、google总结
基于MATLAB的数字图像处理的第六章·形态学图像处理,简单了解图像腐蚀和膨胀、开运算和闭运算
基于MATLAB的数字图像处理的第五章·图像编码,介绍主要的图像压缩编码方式,包括有损和无损,对一些不常用的以及信息论中的方法极略介绍
多机器人SLAM系统(MR-SLAM系统)相比单机器人系统最主要的限制是:通信带宽的限制。在MR-SLAM系统中,为了整合整个团队的所有轨迹,团队中的每个机器人都需要共享其关键帧数据(包括关键帧姿态和观察到的特征点),以处理机器人间的闭环和全局定位。这种类型的数据交换占用了很高的通信容量,很可能降低实时性能。一些工程上的解决方案比如降低频率、减少关键点数量可以降低通信带宽,但会导致定位精度降低;提