




- @qq_45762996
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
当你打开 VS Code 时,它的终端自动激活了 Conda 环境,通常是由或触发的。下面是详细原因与关闭方法👇。
《笨办法学git》的问题记录

的核心优势在于简化了开发过程。它允许你在项目目录中随意编辑代码,同时所有改动会自动反映到安装环境中,非常适合开发周期中频繁修改代码的场景。

W: GPG 错误:http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammyInRelease: 下列签名无效: EXPKEYSIG F42ED6FBAB17C654 Open RoboticsE: 仓库没有数字签名。N: 无法安全地用该源进行更新,所以默认禁用该源。N: 参见 apt-secure(8)手册以了解仓库创建和用户配置方面的细节。

VS code无法启动的解决方法

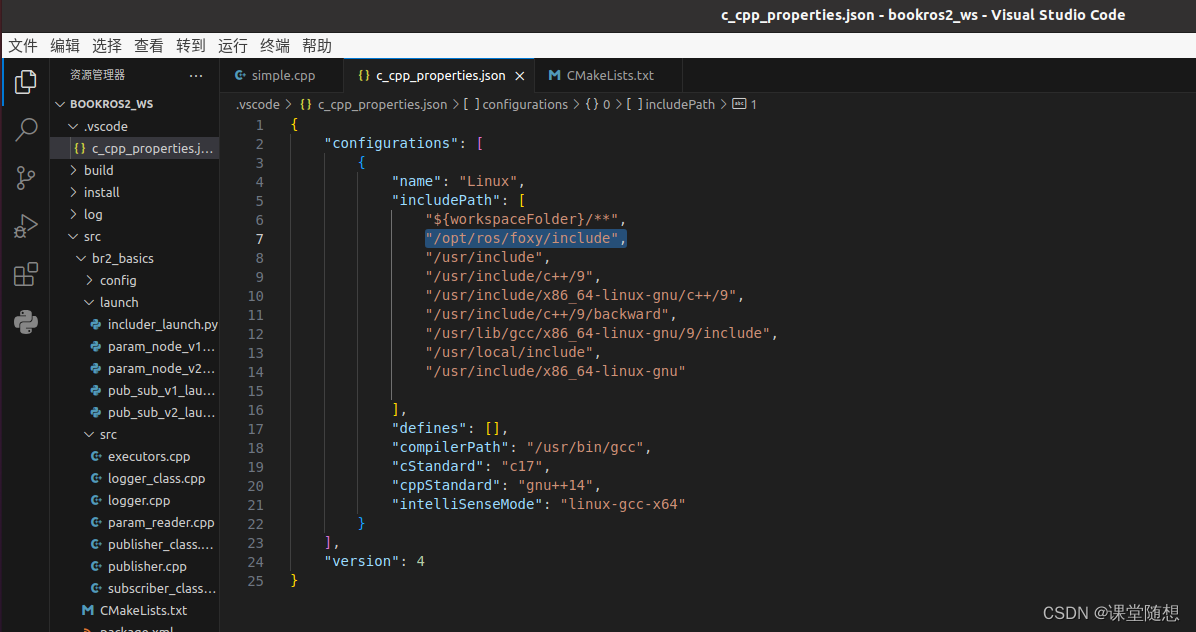
【代码】Vscode 报错#include “rclcpp/rclcpp.hpp“
带有箭头的文件夹()通常表示这是一个 Git 子模块(submodule)。Git 子模块是一种嵌入式的 Git 仓库,它允许你在一个仓库中引用其他的 Git 仓库。换句话说,不是这个项目自身的文件夹,而是来自另一个外部的 Git 仓库,该仓库被嵌入到这个项目中。在这种情况下,子模块需要单独初始化和更新。这将拉取并下载子模块的内容。

在大多数现代系统中,vim常常取代vi作为默认编辑器。如果仅用于简单文本编辑,vi完全够用;而如果需要更强大的文本编辑功能,尤其是在代码开发中,vim更为推荐。vi。
这个命令会显示所有级别(系统级、全局级和本地级)的 Git 配置项。