




- @qq_44324181
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
文章目录前言方法方法一方法二参考前言从头训练一个网络是需要耗费大量算力的,主干网络往往采用一些特征提取能力很强的网络如Resnet50、HRNet w32等等。若自己对模型结构进行修改,就不能直接载入完整的预训练模型。方法方法一载入权重之后,将最后一个全连接层的输出大小改为 5(默认是 1000 )。import osimport torchimport torch.nn as nnfrom mo

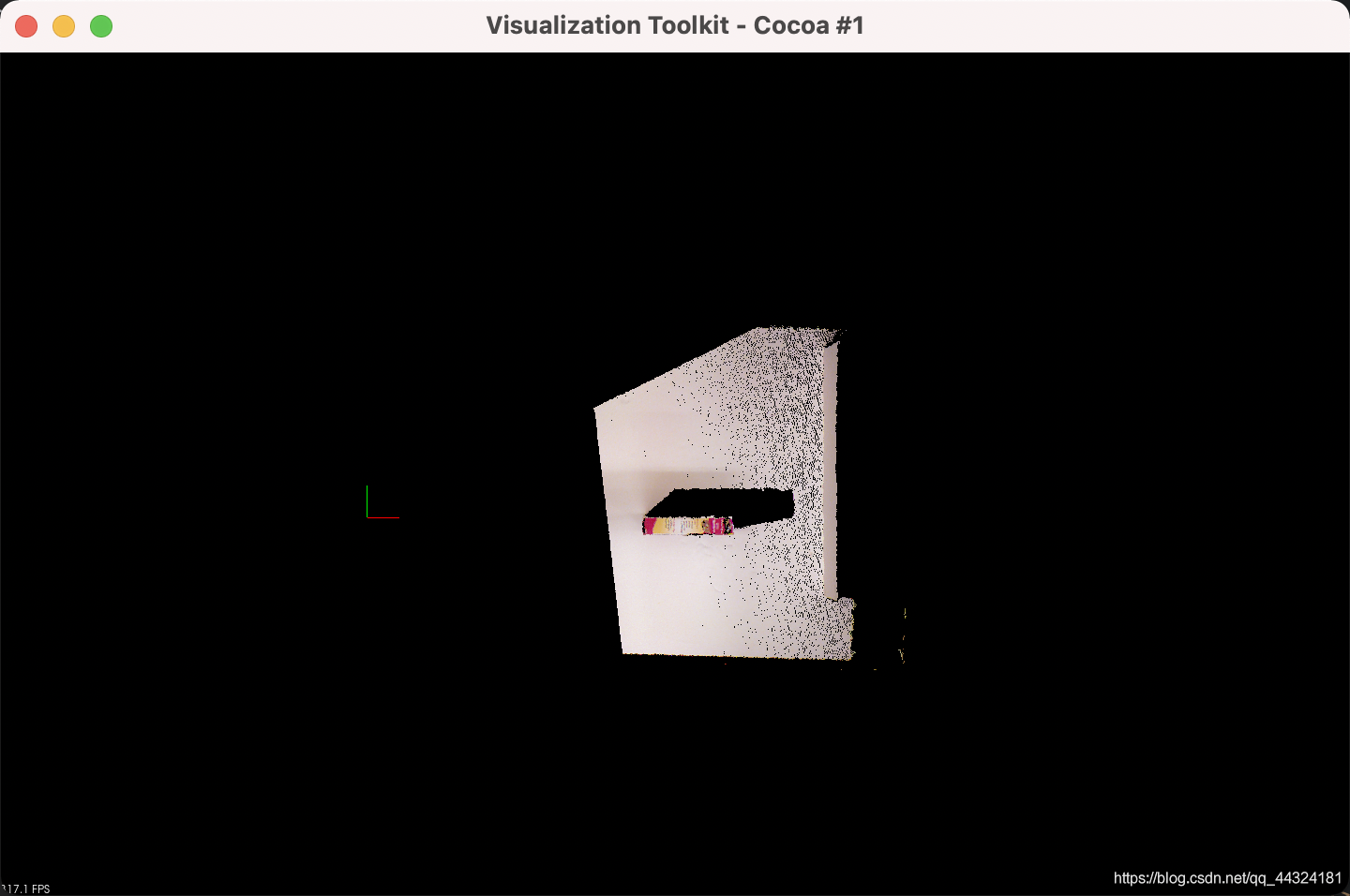
文章目录数据集来源基础知识可视化文件格式转换(txt 转 pcd)数据集来源基础知识首先要了解 PCL 官方教程给出的关于 PCD 文件的格式。PCD(点云数据)文件格式????下面是康奈尔数据集中 pcd0100.txt 的内容:# .PCD v.7 - Point Cloud Data file format # 指定PCD文件版本# FIELDS 指定点可以拥有的每个维度/字段的名称FIEL
安装软件下载链接:https://rustdesk.com/zh/Ubuntu 下安装先安装依赖:sudo apt-get install libxdo3开始安装下载的deb包:sudo dpkg -i rustdesk-1.1.5.deb # 对应自己下载的包名Win10 安装下载exe文件后直接运行即可使用。...
文章目录数据集来源基础知识可视化文件格式转换(txt 转 pcd)数据集来源基础知识首先要了解 PCL 官方教程给出的关于 PCD 文件的格式。PCD(点云数据)文件格式????下面是康奈尔数据集中 pcd0100.txt 的内容:# .PCD v.7 - Point Cloud Data file format # 指定PCD文件版本# FIELDS 指定点可以拥有的每个维度/字段的名称FIEL
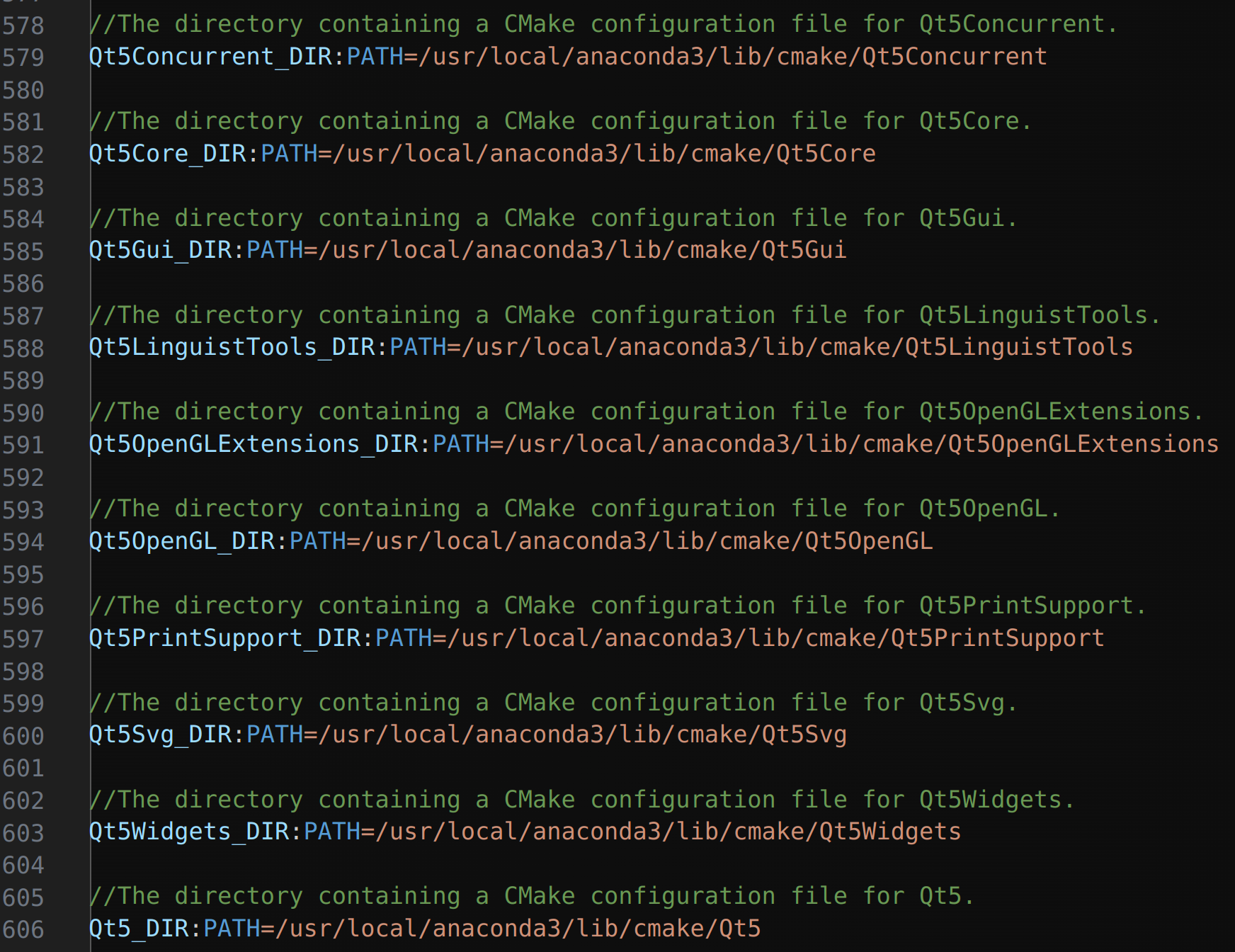
这里anaconda下的QT库是基于python的,不可能去引用C++的函数,所以这是由于我的系统中包含了C++和Python二者的QT,项目优先去调用Python的了。一劳永逸的方法就是在环境变量中添加C++版QT的路径,在。将上图中的路径全部改为C++的QT路径之后,可以。可以找到正确的路径了,见。
1. Bugrospy.init_node() has already been called with different arguments2. 原因一个 python 文件中只能初始化一个节点。我在一个 python 文件中导入了另一个 module,在另一个 module 中的类的初始化函数中存在一个:rospy.init_node()在调用这个类时,这与 main 函数所在的 pytho
文章目录catkin_make报错输出如下:解决方法:catkin_make报错输出如下:CMake Error at experiment3/CMakeLists.txt:215 (add_executable):add_executable cannot create target "track" because another target with thesame name already
效果图:在VScode中Ctrl+c复制代码;Word 中点击:插入-->对象-->OpenDocument Text-->确定;在新弹出的Word界面中Ctrl+v黏贴代码,保存,关掉窗口。
文章目录前言方法方法一方法二参考前言从头训练一个网络是需要耗费大量算力的,主干网络往往采用一些特征提取能力很强的网络如Resnet50、HRNet w32等等。若自己对模型结构进行修改,就不能直接载入完整的预训练模型。方法方法一载入权重之后,将最后一个全连接层的输出大小改为 5(默认是 1000 )。import osimport torchimport torch.nn as nnfrom mo
安装参考官网:http://wiki.ros.org/noetic/Installation/Ubuntu错误解决方法:#打开hosts文件sudo gedit /etc/hosts#在文件末尾添加151.101.84.133raw.githubusercontent.com#保存sudo rosdep initrosdep update