- @qq_44164791
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
视觉SLAM十四讲——ch7
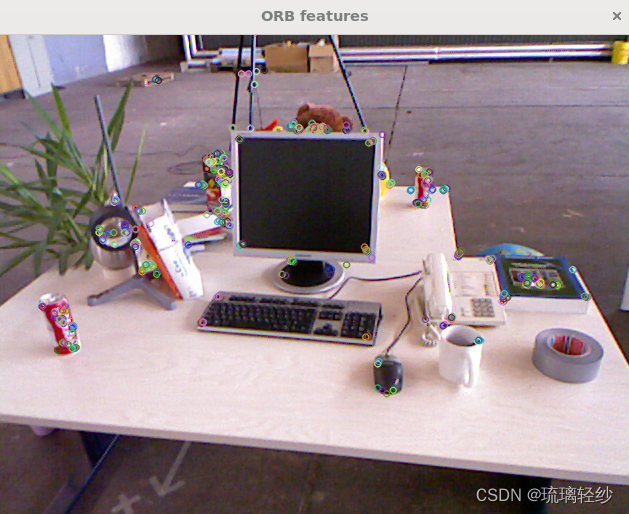
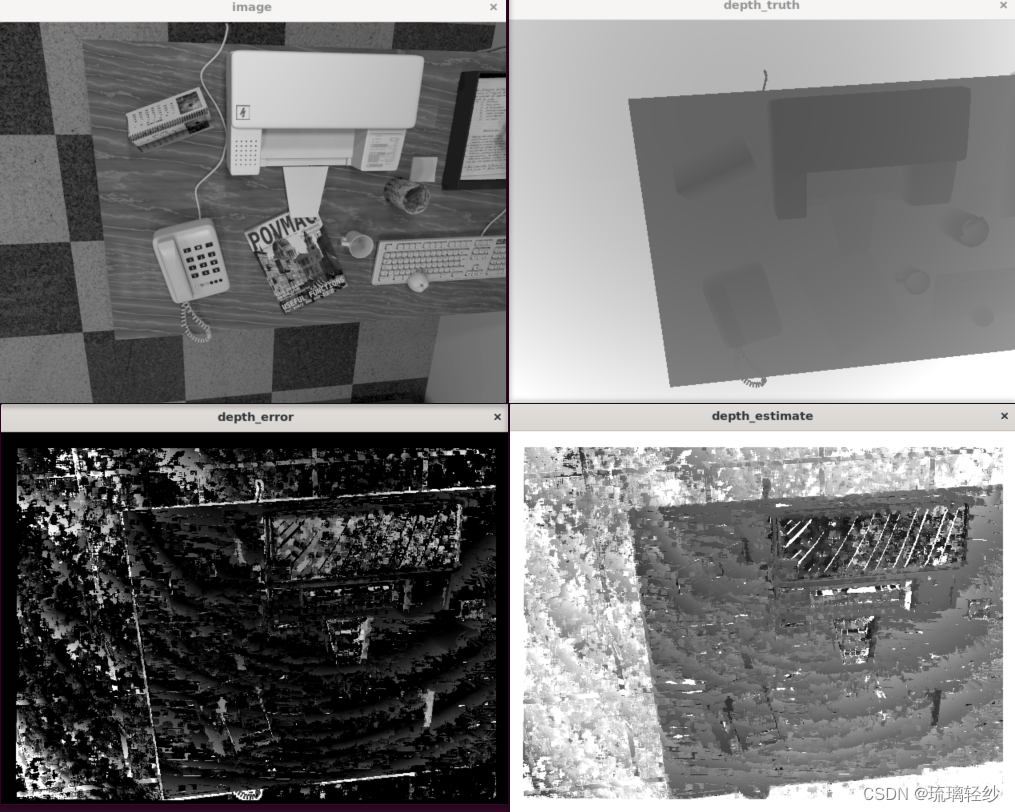
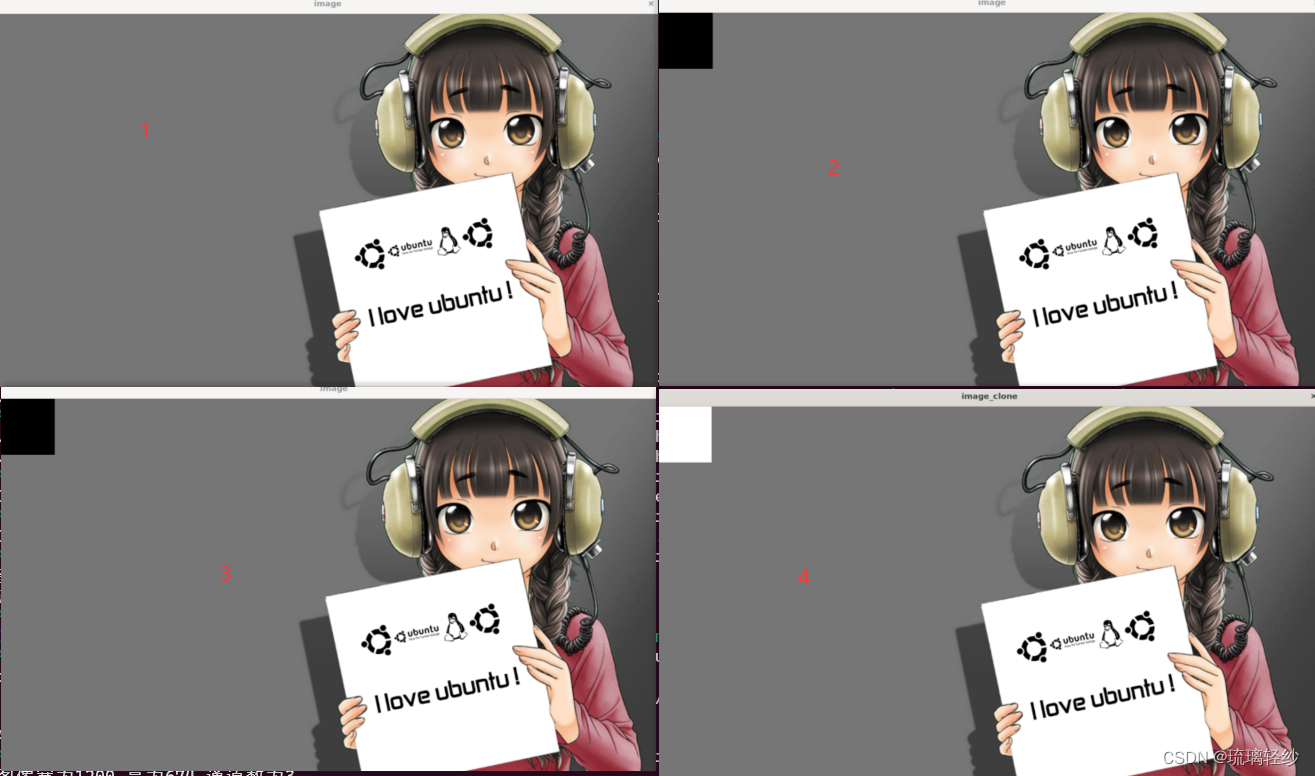
在build中进入 stereo,注意更改stereoVision.cpp中图片文件的路径。注意:路径需要改成自己的!(3)SGBM的视差图(因为有一部分左眼看到了但是右眼没看到,所以对应的视察是空的)在build中进入 stereo,注意更改joinMap.cpp中图片文件的路径。OpenCV提供了大量的开源图像算法,是计算机视觉中使用极广的图像处理算法库。首先弹出第一个图片,按任意键弹出第二个
Ceres BA使用的是BAL数据集。在本例中,使用problem-16-22106-pre.txt文件。BAL的数据集自身存在的特殊BAL的相机内参模型由焦距f和畸变参数k1,k2给出。因为BAL数据在投影时假设投影平面在相机光心之后,所以按照我们之前用的模型计算,需要在投影之后乘以系数-1。
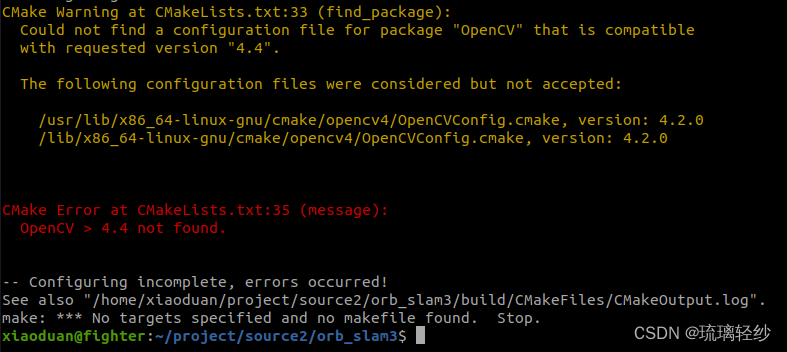
这个编译错误是因为您在使用 OpenCV 库时,使用了在较早版本中定义的已弃用的常量 CV_FILLED。第三段视频是在第二段视频的运行代码上,将后端优化的部分给注释掉后,通过轨迹可以看出来效果比较好,可能因为优化时矫正过度的原因。第二段视频是经过更改可视化的代码,将相机的运动轨迹绘画出来,但是根据视频可以看出来,轨迹效果并不好。第一段视频是ch13中原本的代码,经过更改一些错误之后,能够正常运行
因为环境比较干净,所以遇到的问题相对少一些,不过每一个问题都进行了完善的解决我的环境是刚装完Ubuntu20.04之后,并进行了的操作之后的一个环境。
整个大体的步骤大体就有以下几个过程。下载viz3d并执行pip install . 进行安装gitcd执行超级构建对cmake进行手动升级执行构建slam库执行构建ros库独立建立工作空间,与git的地址不同进行节点创立完成然后进行运行。
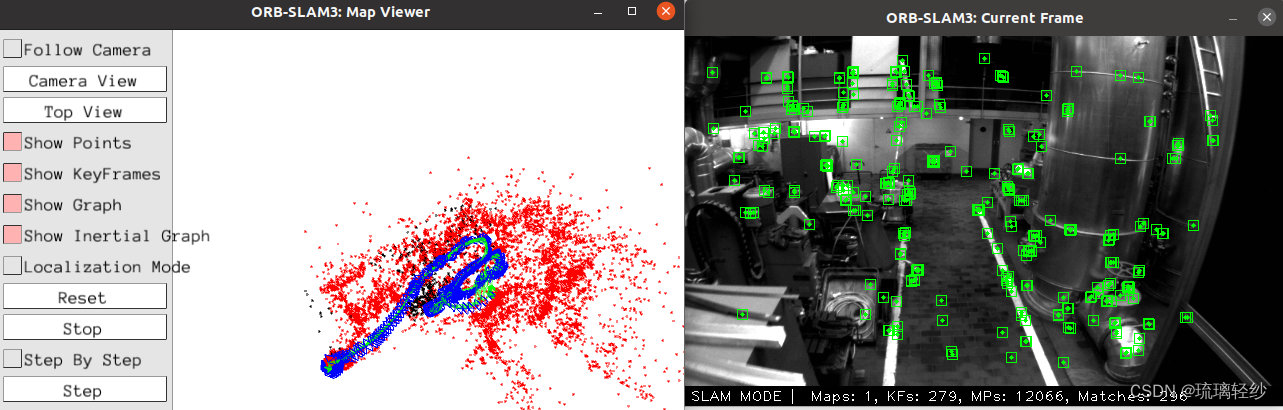
所提供的图像具有高动态范围,事先进行了光度标定,用20Hz的帧率采集,分辨率为1024像素*1024像素;需要下载数据集dataset-room1_512_16和rgbd_dataset_freiburg1_desk。在一键安装ROS后,只需要再安装Pangolin即可,其他所有的需要都已经存在。用微型飞行器采集的视觉惯性数据集,包含双目相机和IMU同步测量数据及位姿的真值。第二条命令中的${RO
案例描述:实现过程:代码:运行结果:代码解析:ASCII表:案例描述:实现过程:代码:运行结果:代码解析:注意:因为0~31是非打印控制字符,所以没有打印出来。案例描述:实现过程:代码:运行结果:代码解析:注意:第 27、28 行是释放指针内存,在用 new 申请内存时,必须在程序结尾包含这句代码,否则会出现内存泄漏或野指针。案例描述:实现过程:代码:运行结果:代码解析:#defne定义的常量语句
本实例利用函数 int level(char ch)判断输入运算符的级别,它的返回值为输入运算符的级别数值。小于0.5,直接舍去,在程序中,可以利用显式转换直接取整的方式,将小数点后的数据舍去。案例中给出苹果的总数和人数,同样,这两个数值可以根据需要,利用cin进行终端输入。就如两个有水的杯子,想要交换里面的水,需要拿一个临时的空杯子一样的实现过程一样。在进行简单运算时,一般都是相同数据类型之间的
make -j” 是一个 Linux 命令,它使用所有可用的 CPU 核心来并行编译程序。通常在不指定进程数量时,使用这个命令可以最大化地利用 CPU 资源以加快编译速度。这个命令会启动尽可能多的进程来同时编译程序,以便快速生成可执行文件。此命令将自动检测计算机上可用的 CPU 核心数量,并在所有可用的核心上启动相应数目的编译任务。需要注意的是,由于多个进程同时在运行,因此使用 “make -j”