




- @qq_42244167
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
因此,通常会使用一些改进的变体,如Mini-Batch SGD、Momentum SGD、Adagrad、RMSProp和Adam等,以在一定程度上控制随机性,并加速收敛。学习率的选择很重要,过小的学习率可能导致训练过慢,而过大的学习率可能导致不稳定性和振荡。它每次迭代时从训练数据中随机选择一个小批量(mini-batch)的样本来计算梯度,然后使用梯度的相反方向更新模型参数。:SGD通常需要大量

学习新的语言代码时总数需要下载不同的IDE,配置环境,特浪费时间.在线编辑器帮你省时间,帮你解决后顾之忧.常用的代码在线编辑器 :1. OnlineGDB:地址:https://www.onlinegdb.com/2. Codechef:地址:https://www.codechef.com/ide3. Ideone:地址:https://www.ideone.com/4. 菜鸟教程:地址:菜鸟教
因此,通常会使用一些改进的变体,如Mini-Batch SGD、Momentum SGD、Adagrad、RMSProp和Adam等,以在一定程度上控制随机性,并加速收敛。学习率的选择很重要,过小的学习率可能导致训练过慢,而过大的学习率可能导致不稳定性和振荡。它每次迭代时从训练数据中随机选择一个小批量(mini-batch)的样本来计算梯度,然后使用梯度的相反方向更新模型参数。:SGD通常需要大量
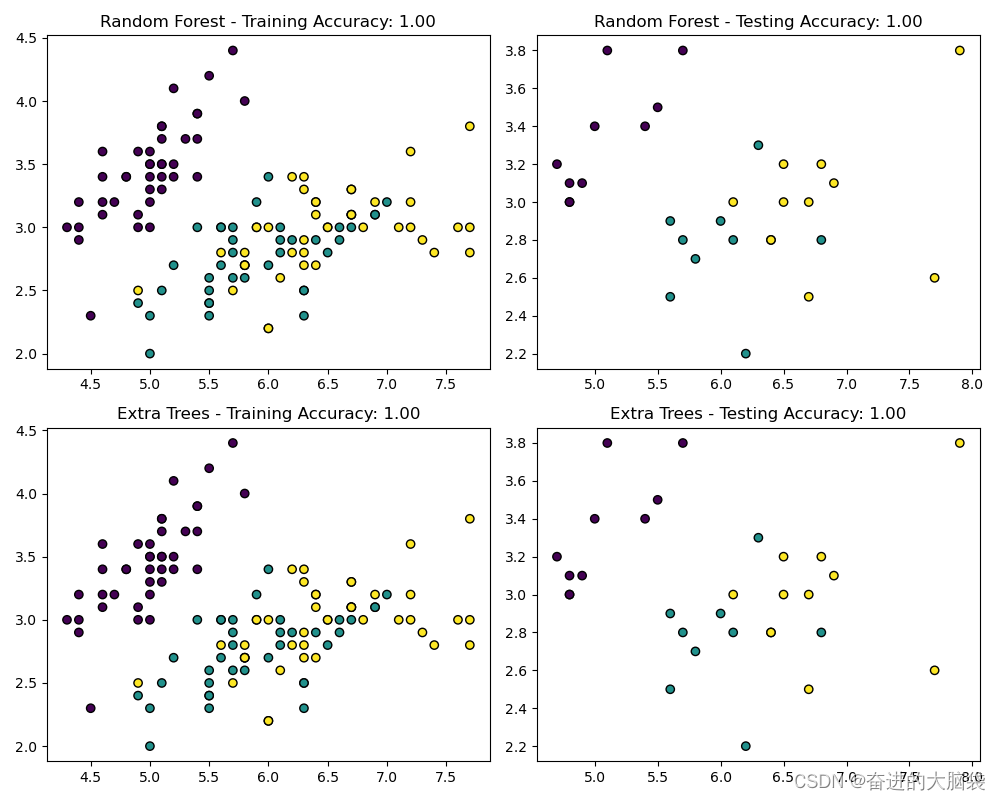
随机森林是一种集成学习方法,它是由多个决策树组成的模型,其中每棵树都是随机生成的。随机深林包括两种主要类型:随机森林和极端随机树。
因此,通常会使用一些改进的变体,如Mini-Batch SGD、Momentum SGD、Adagrad、RMSProp和Adam等,以在一定程度上控制随机性,并加速收敛。学习率的选择很重要,过小的学习率可能导致训练过慢,而过大的学习率可能导致不稳定性和振荡。它每次迭代时从训练数据中随机选择一个小批量(mini-batch)的样本来计算梯度,然后使用梯度的相反方向更新模型参数。:SGD通常需要大量
它通过分析相机在不同视角下捕获的图像来推断场景的三维结构和摄像机的运动。NeRF是一种基于神经网络的算法,用于从图像中重建逼真的三维场景模型。它通过训练一个神经网络来建模每个空间点的颜色和密度,然后可以使用这个模型生成新的视图和逼真的渲染效果。NeRF的目标是捕获场景的精细细节和光照效果,使重建的三维模型更加真实。SFM(Structure from Motion)和NeRF(Neural Rad
顾名思义:集中式多机调度就是指,机器的数据是集中的,有统一的控制中心调度,类似于现实中的机场调度中心,铁路调度中心,一般机器将定位,速度,评价优先级的信息同步到数据中心,由数据中心统一调度,常见的调度会加入时间窗,对轨迹的优化等等,这样机器运行会更加流畅,一般在AGV,仓储物流中用的比较多,或者码头等场景。优点:逻辑简单,技术难度小缺点:需要布设控制中心,安装成本高,维护成本高,控制中心的算力要求

OpenCV(Open Source Computer Vision Library)是一个用于计算机视觉任务的开源库。以下是一些OpenCV中常用的操作:读取和显示图像:pythonimport cv2读取图像img = cv2.imread(‘image.jpg’)显示图像cv2.imshow(‘Image’, img)cv2.waitKey(0)cv2.destroyAllWindows()
