




- @qq_37087723
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
可以复制文件名加行号,还可以将选中函数名进行复制,比较方便。

但是,将该选项设置为 debug-in-terminal 定义了仅在访问编辑器右上角的 “运行 Python 文件” 按钮时才应使用该配置(无论该按钮提供的是 “运行 Python 文件” 还是 “调试 Python 文件” 选项)。使用 “console”: “integratedTerminal” 或 “console”: “externalTerminal” 时通常会禁用此选项,因为无需在调

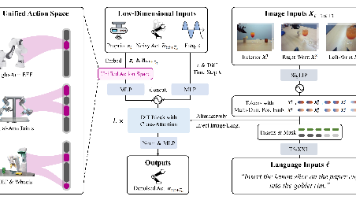
流匹配是一种基于生成模型的动作生成方法,通过定义从噪声分布到目标动作分布的连续路径来实现动作生成。其核心是学习一个速度场v(A^t, o, t),指导噪声样本逐步向真实动作转变。训练时,神经网络学习预测真实速度场,最小化预测与真实速度的L2损失。推理时,从噪声出发,通过迭代应用速度场逐步生成动作。相比传统的行为克隆方法,流匹配提供了一种新的生成式建模思路,能够更灵活地处理动作生成任务。该方法通过连

可以复制文件名加行号,还可以将选中函数名进行复制,比较方便。
小知识:字母"B"通常代表“Billion”,即“十亿”。这是模型训练中所使用到参数的数量。例如,GPT-3模型有175B个参数,这里的“175B”就是表示该模型有1750亿个参数。一般情况下,参数越多,代表模型训练的越复杂,模型的能力也就越强。通常1B,意味着需要1G以上的内存,7B需要8G以上的内存才能成功运行大模型。
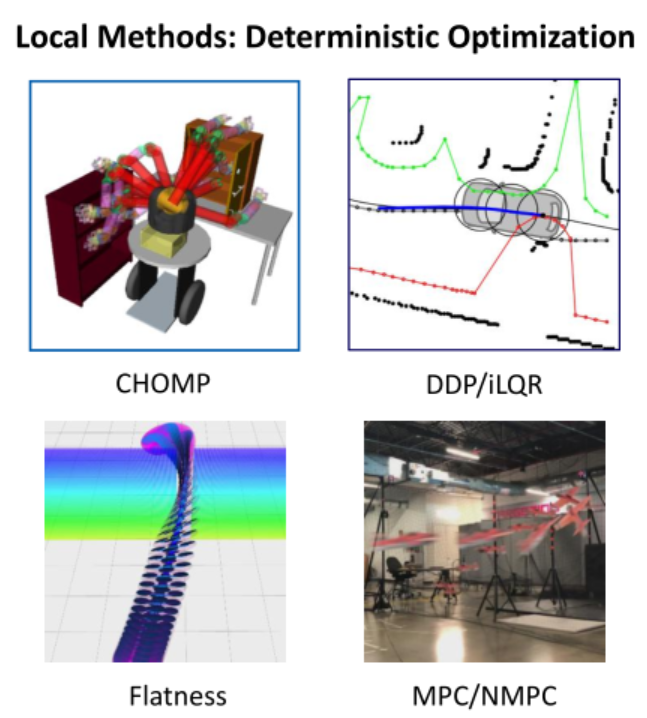
Introduction为什么需要平滑轨迹呢•适合自主移动。•速度/高阶动力学状态不能突变。•机器人不能在转弯时停下来。•节约能源。为啥需要轨迹生成/优化问:我们有前端(寻径),为什么必须有后端(轨迹生成)?见上问:前端是动态可行的,为什么后端必须如蓝色为优化的轨迹,更适合汽车的运动平滑的轨迹生成•边界条件:起点、目标位置(方向)•中间条件:中继节点waypoint,位置(方向)xx•通过路径规划
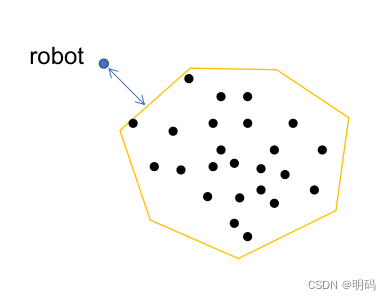
T:whatY:whyW:how针对点云的无序性,无法通过坐标索引进行查询,常常将点云地图转换其他类型的地图,如Octomap,从而进行碰撞检测;为快速进行机器人与障碍物的位置计算,可以采用凸包算法获取一个包含点云的凸包,如PCL库中CropHull滤波器,得到凸包后可以向上一问中那样获取机器人与障碍物之间的位置关系,如下图所示,如果机器人是凸多边形描述,也可使用GJK-EPA检测凸多边形之间的碰
IntroductionModelSystem model(质点本身的运动)Problem model(一般需要非线性方法来解决)PredictionState spaceInput spaceParameter spaceControlThe process of choosing the best policModel微分约束不等式约束等式约束障碍物约束(特殊,通常非凸的)Parameter

但是,将该选项设置为 debug-in-terminal 定义了仅在访问编辑器右上角的 “运行 Python 文件” 按钮时才应使用该配置(无论该按钮提供的是 “运行 Python 文件” 还是 “调试 Python 文件” 选项)。使用 “console”: “integratedTerminal” 或 “console”: “externalTerminal” 时通常会禁用此选项,因为无需在调