- @qq_35844208
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
随着阵元数的增加,波束宽度变窄,分辨力提高,仿真图如下:在固定阵元数条件下,波束宽度随着角度的增大而增大,该现象满足角度分辨率随着角度增大而降低的理论推导。当阵元间距 d>λ/2时,会出现栅瓣,导致空间模糊。仿真图如下:类似于时域滤波(空域滤波),天线方向图是最优权的傅立叶变换。仿真程序和仿真图如下:仿真图如下:仿真图如下:仿真图如下:仿真图如下:仿真图如下:仿真图如下:当采样数L=2048时仿真

雷达接收处理包括射频前端,基带信号处理和后处理算法三部分:(1)射频前端完成高频雷达接收信号的模拟域信号处理和数模转换(ADC);(2)基带信号处理在零中频上完成雷达接收信号的数字信号处理(DSP)和目标检测;(3)在目标检测之后的高层算法被统称为后处理算法,如聚类(Clustering)、 关联(Association)、跟踪(Tracking)、分类(Classification)等。这三部分

雷达接收处理包括射频前端,基带信号处理和后处理算法三部分:(1)射频前端完成高频雷达接收信号的模拟域信号处理和数模转换(ADC);(2)基带信号处理在零中频上完成雷达接收信号的数字信号处理(DSP)和目标检测;(3)在目标检测之后的高层算法被统称为后处理算法,如聚类(Clustering)、 关联(Association)、跟踪(Tracking)、分类(Classification)等。这三部分
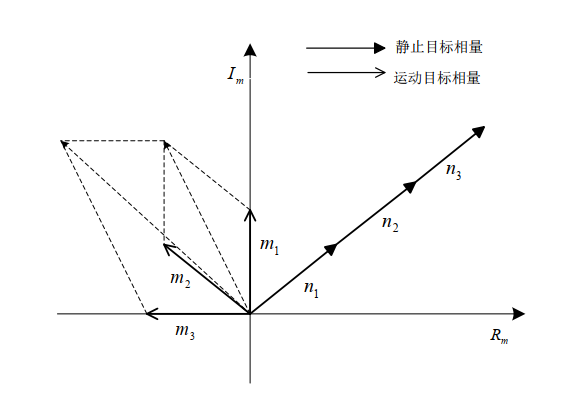
相量均值相消算法,也被称为平均相消算法,其实现的原理为:静止目标到雷达天线的距离是不变的,每一束接收脉冲上静止目标的时延也是不变的,对所有接收脉冲求平均就可以得到参考的接收脉冲,然后用每一束接收脉冲减去参考接收脉冲就可以得到目标回波信号,核心思想是求均值做差。MTI是雷达工程师们熟稔于心的雷达信号处理算法,基本上没有不了解的。MTI的核心原理就是静止目标的相位不会发生变化,而运动目标的相位与静止目
本文编辑:调皮哥的小助理本程序来源:https://github.com/ekurtgl/FMCW-MIMO-Radar-Simulation,作者是阿拉巴马大学博士生艾库特格尔,研究方向主要是雷达信号处理人类活动识别以及雷达数据的机器学习应用,这份比较新的开源雷达仿真代码,值得大家学习。下面主要分析代码的主要内容,方便大家解读。程序目录如下:图片FMCW_simulation.m是创建点目标并估

本文编辑:@调皮连续波,保持关注调皮哥,获得更多学习内容和建议!之前在知乎评论区,有人公开叫板说:“雷达感觉前景不行啊,大疆的毫米波雷达都无了,华为也在干一些毫无意义的事情,这个方向感觉除了智能驾驶有极其小的概率会用其他行业是不会大规模用到毫米波雷达的,其他雷达民用可能就更难了”。我个人觉得,格局应该打开一些,不能说现在没有像互联网那样不好挣钱就说雷达没有意义,只是我们的研究还在继续,等到技术成熟

本文编辑:调皮哥的小助理众所周知,通常雷达在检测目标时如果目标是靠近雷达做径向运动,目标速度的速度就是正的。反之,如果目标是远离雷达做径向运动的,那么目标的速度就是负的。这个结论是如何来的,为何调频连续波雷达和一般的脉冲雷达不一样呢?下面针对这个问题,我们一起来研究一下。首先为了弄清楚脉冲雷达和调频连续波雷达测速原理的区别,先对脉冲雷达的测速原理进行梳理。
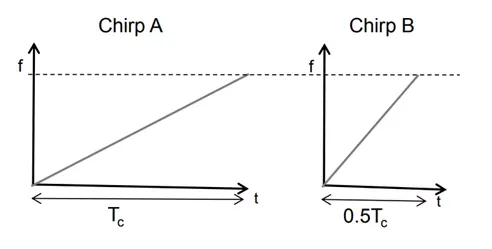
同时这个公式也能够证明,在ADC采样率不变的情况下,雷达的探测距离随着信号的斜率成反比关系,如果发射周期固定不变,那么雷达探测距离和信号的带宽成反比关系。另外,如果两个发射脉冲具有相同的距离分辨率,对于相同的最远探测距离,斜率大的脉冲所需要的ADC采样率更高,但是换来的好处是脉冲周期短。但是,雷达的中频带宽却被ADC的采样频率所限制,因为ADC为IQ双路采集,所以ADC的最高采样率就要大于等于最大
相控阵(Phased Array Radar,PAR),顾名思义,即相位被控制的阵列,记住:这里其实是被动语态,相位是被控制,应该写成“相位被控的阵列”,但是为了简化我们习惯于称其为相控阵,由相控阵组成的雷达被称为相控阵雷达。大家都知道,相位被控制就会产生波束不同的指向,其原理是:利用大量个别控制的小型天线单元排列成天线阵面,每个天线单元都由独立的移相器,通过控制各个天线单元发射信号的相位,就能合
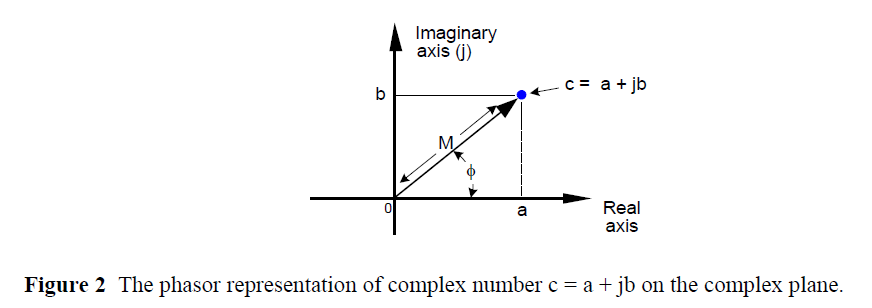
基于复数的概念的正交信号,以及与正交信号相关的许多如j-operator(算符、算子)、complex(复数的)、imaginary(虚部的)、real(实部的),以及orthogonal(正交的)等专业术语,可能会比其他的课程习题更能令数字信号处理专业的初学者们感到头疼。如果你有点不确定复数和j=sqrt(-1)(-1开平方根)算子的实际物理意义,没关系,请你不要感到悲伤。因为,甚至是世界最伟大