




- @qq_20660115
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
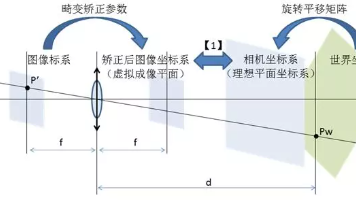
单目相机标定是通过棋盘格标定板计算相机内参(焦距、主点坐标、畸变系数)和外参(旋转矩阵、平移向量)的过程。标定步骤包括:1)在不同位置拍摄多张标定板图像;2)使用OpenCV检测图像中的角点坐标;3)将角点坐标与对应世界坐标输入标定算法(如张正友标定法)计算相机参数。示例代码展示了如何使用OpenCV实现这一过程,包括角点检测、参数计算及结果输出。标定结果可用于消除图像畸变,实现精确的视觉测量和三
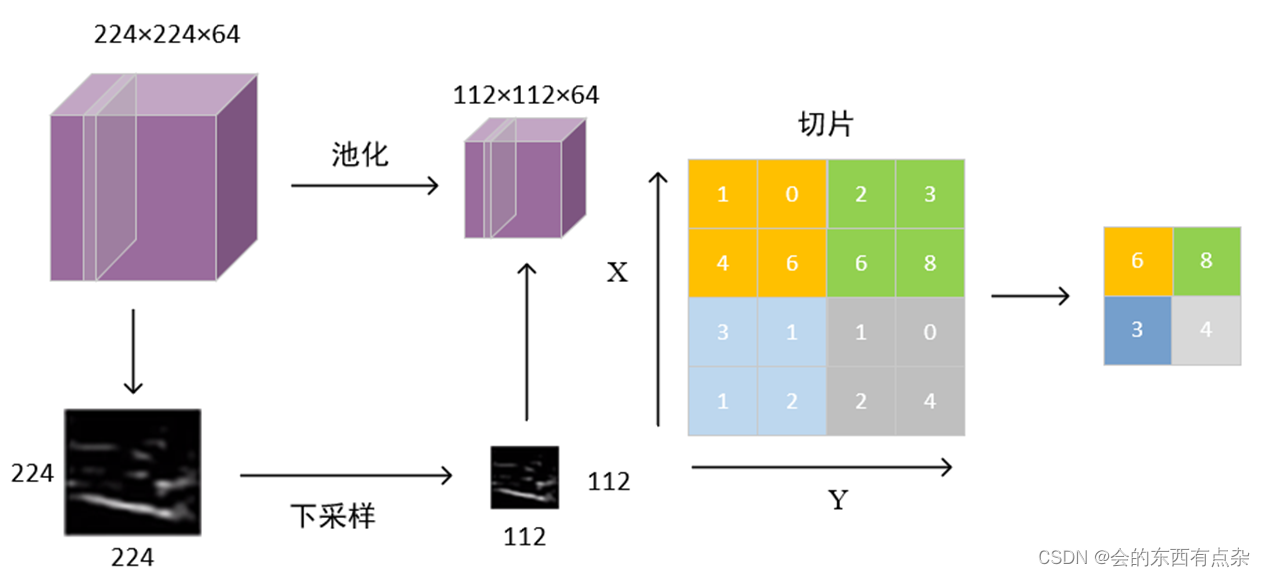
激活层的作用在于将前一层的线性输出,通过非线性的激活函数进行处理,这样用以模拟任意函数,从而增强网络的表征能力。根据特征图上的局部统计信息进行下采样,在保留有用信息的同时减少特征图的大小。和卷积层不同的是,池化层不包含需要学习的参数。范围内的平均值,最大池化就是取该范围内的最大值。局部区域池化中最大池化使用更多,而全局平均池化。,认为当数值为负的时候可能也存在一定有用的信息,那么就乘以一个系数。(
为了应对客户的多种需求,我们提供了多种模式可供选择,客户可根据自己的需求灵活使用。本司提供的例程包含的模式包括一次回调模式,阻塞模式,无限循环模式,2.5D模式。SsznCamControl类为基于通讯库SR7Link.dll封装的相机控制器类,定义了一些相机控制器的基本属性,图像数据刷新回调委托和控制器运行信息回调委托,以及控制器的操作、参数设置、数据与图像相互转换的方法函数。

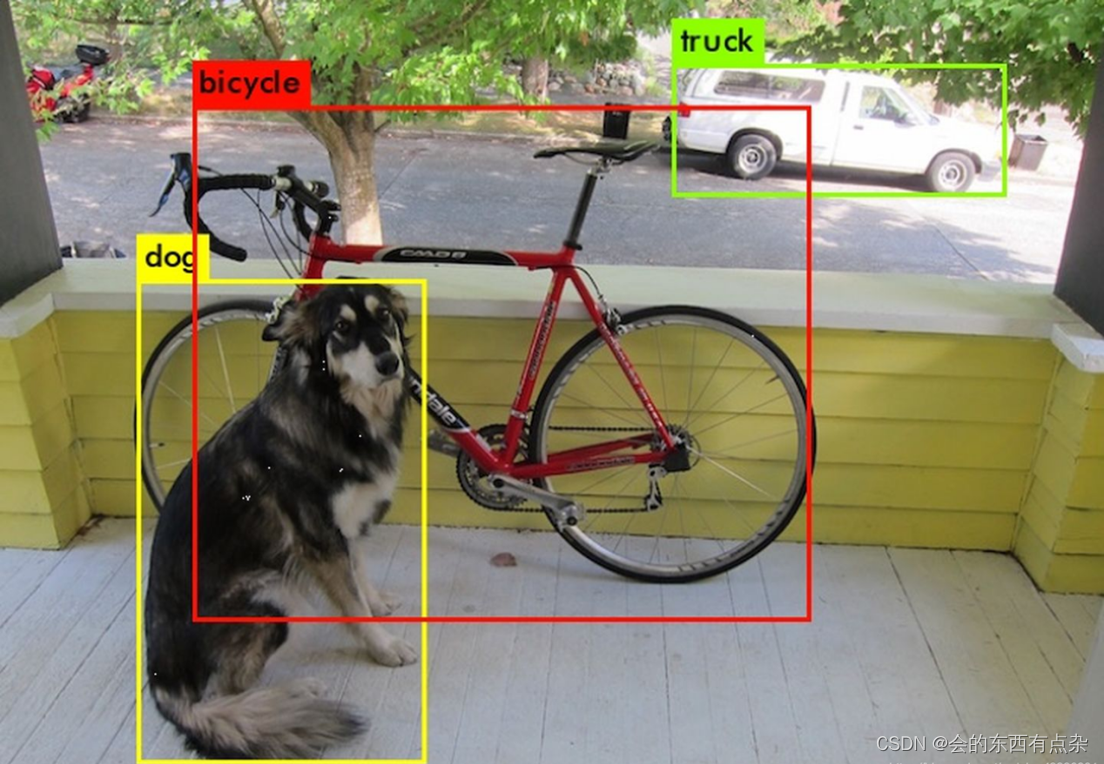
在计算机视觉众多的技术领域中,目标检测()也是一项非常基础的任务,图像分割、物体追踪、关键点检测等通常都要依赖于目标检测。在目标检测时,由于每张图像中物体的数量、大小及姿态各有不同,也就是非结构化的输出。图像分类、目标检测和图像分割的区别?计算机视觉中,图像分类、目标检测和图像分割都属于基础、也是目前发展最为迅速的3个领域,下面具体看一下这几个任务之间的区别。图像分类:输入图像往往仅包含一个物体,
该方法的基本概念是对任意输入像素的灰度级进行三个独立的变换。然后,将三个变换结果分别发送到彩电电视监视器的红、绿、蓝通道。由于三个转换器在同一个灰度上执行不同的变换,所以三个转换器的输出是不同的,从而不同大小的灰度级可以合成不同的颜色。在上述灰度分层中,利用灰度的分段线性函数来产生颜色。这里讨论的灰度到颜色转换方法基于平滑的线性和非线性函数。这种方法具有相当的技术灵活性,通过这种方法得到的图像的颜

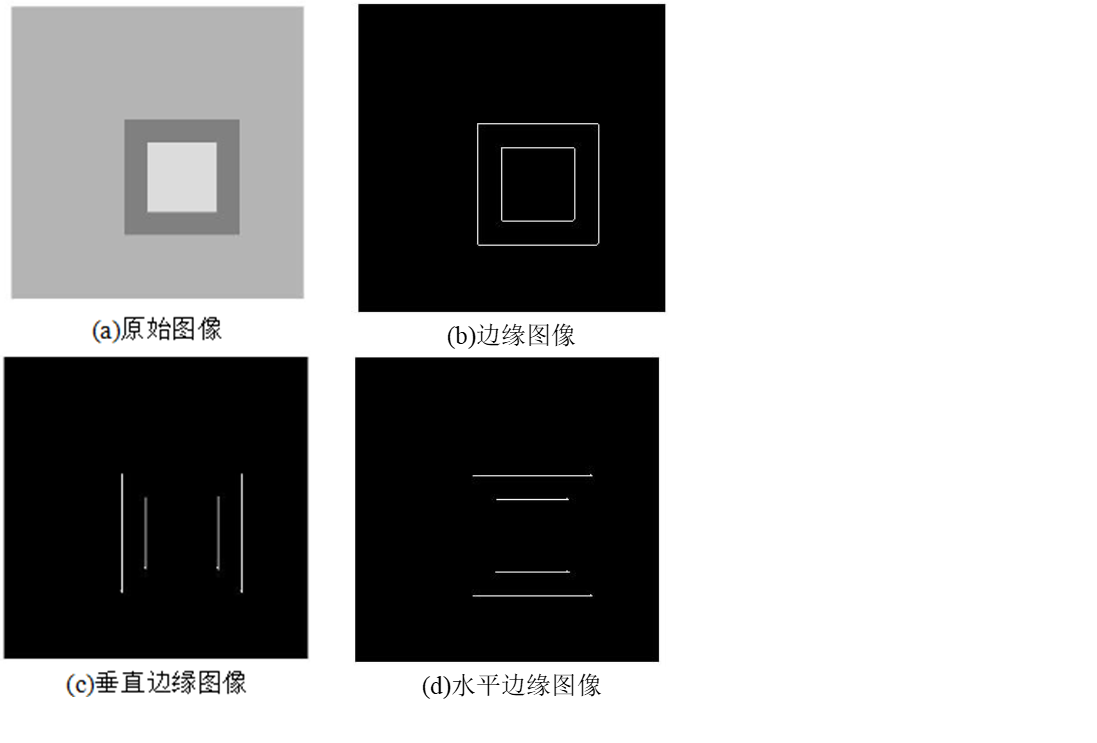
如果一个像素落在图像中某一个物体的边界上,那么它的邻域将成为一个灰度级变化的带。对这种变化最有用的两个特征是灰度的变化率和方向,它们分别以梯度向量的幅度和方向来表示。边缘检测算子检查每一个像素的邻域并对灰度变化率进行量化,通常也包括方向的确定。有若干种方法可以使用,其中大多数是基于方向导数掩模求卷积的方法。
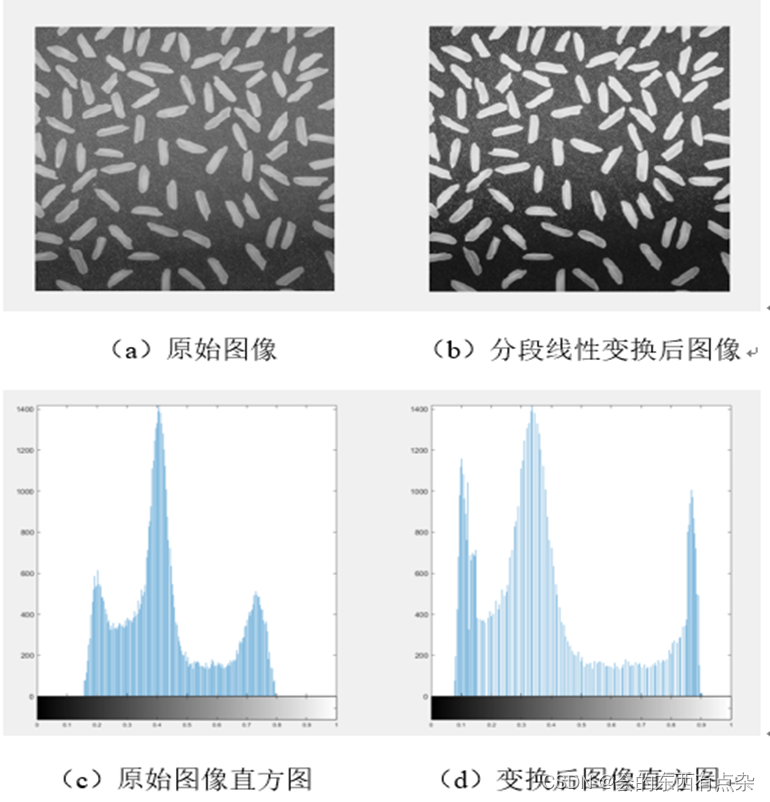
灰度分段线性变换如数学涵义的分段一般,分段线性变换就是将图像不同的灰度范围进行不同的线性灰度处理。其表达式可表示如下:灰度分段线性变换可根据需求突出增强目标区域,而不增强非目标区间,达到特定的显示效果。示例程序。
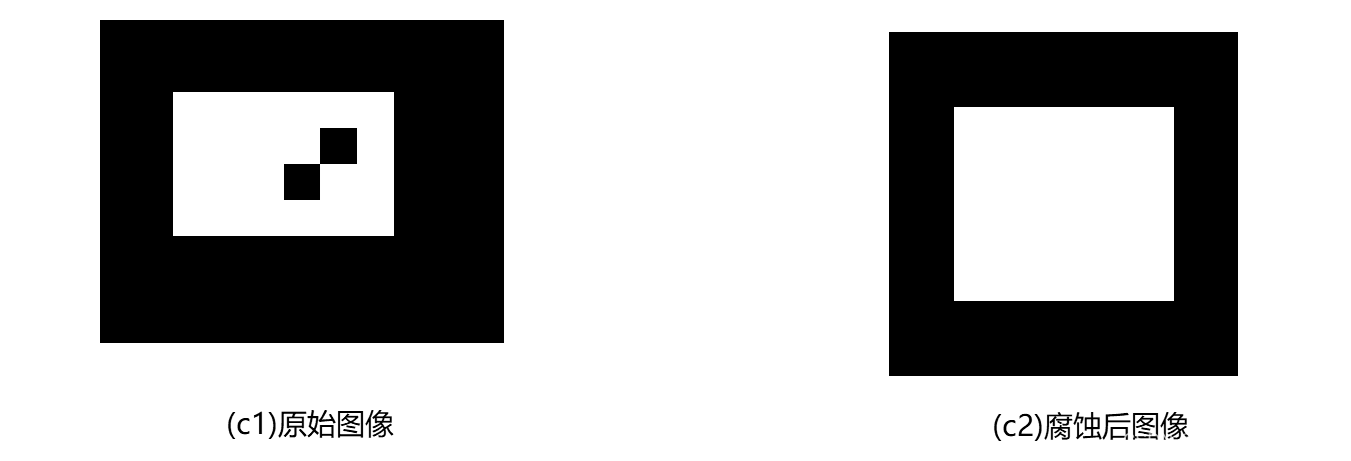
形态学(Morphology)一词通常代表生物学的一个分支,它是研究动物和植物的形态和结构的学科。我们在这里使用同一词语表示数学形态学的内容,将数学形态学(Mathematical Morphology)作为工具从图像中提取对于表达和描述区域形状有用的图像分量,如边界、骨架以及凸壳等。简单的腐蚀是消除物体的所有边界点的一种过程,其结果使剩下的物体沿其周边比原物体小一个像素的面积。如果物体任一点的宽
轴移动时,与该轴垂直的六边形平面的大小是变化的,产生图中所描述的锥体。色调表示为围绕彩色六边形的角度,通常使用其红轴作为参考(系统相比,更加接近于人们的经验和描述彩色感觉时所用的方式。在艺术领域,色调、饱和度和数值分别称为色泽、明暗和调色。中全彩色六边形的中心。这样,该轴就表示了灰度的所有深浅。饱和度(颜色的纯度)由距。时所用的几种彩色系统之一。值分量是沿该锥体的轴度量的。是人们从颜色轮或调色板中

一个典型的车牌号码识别系统包括车牌定位字符分割和字符识别三个主要步骤。车牌定位(也称为车牌分割)是车牌自动识别系统中的关键步骤,对车牌大小自适应性强、速度快和准确率高的车牌定位方法对于整个自动识别系统性能指标的影响是至关重要的。然后进行字符分割。最后通过基于模板匹配的方法或基于人工神经网络的算法进行字符识别。本车牌号码识别系统分为车牌图像预处理与车牌号码识别两大过程。图像预处理分为图像灰度化、直方
