写文章




- @qq_17449077
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
【数字人】Windows上源码部署和使用无docker版HeyGem
HeyGem是硅基智能开源的一款数字人AI产品,官方号称是Heygen的开源平替

照片会说话?开源AI数字人工具SadTalker环境搭建和使用教程
照片说话,数字人,sadtalker 源码运行环境搭建,整合包获取
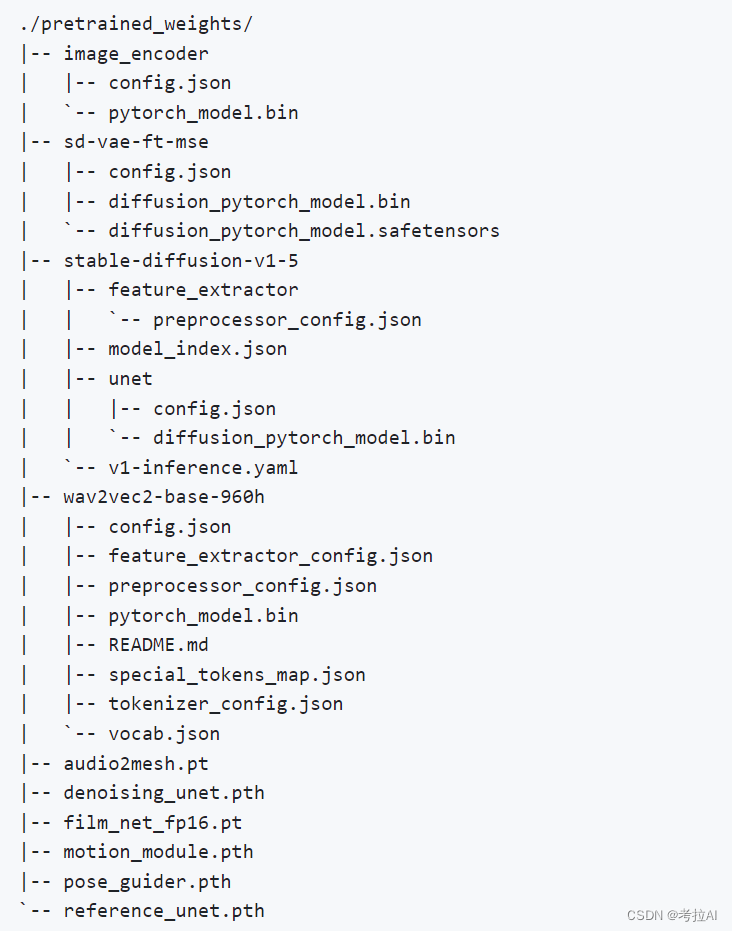
腾讯开源数字人工具AniPortrait整合包获取和使用教程
最近腾讯开源了一款数字人工具,直接对标阿里的EMO,github 地址为:https://github.com/Zejun-Yang/AniPortrait由于源码运行环境搭建较为复杂,觉得麻烦的小伙伴可以跳过第一部分,直接下载我为大家准备的整合包,然后按照文章第二部分使用教程操作即可。
【数字人】Windows上源码部署和使用无docker版HeyGem
HeyGem是硅基智能开源的一款数字人AI产品,官方号称是Heygen的开源平替
腾讯开源数字人视频生成神器MuseV整合包获取和使用教程
MuseV支持图生视频、视频生视频,可与腾讯开源的另一款AI工具MuseTalk 一起构建完整的虚拟人生成解决方案,本文详细介绍了MuseV整合包的获取和使用教程。

【数字人】LatentSync汉化整合包获取和使用教程,6G显存可用
LatentSync是由字节开源的一款支持视频的唇音同步的AI数字人软件,即给定一段视频和语音,可以把视频中的人物的嘴型和表情与语音同步。

视觉SLAM前端——ICP
视觉SLAM前端里程计之ICP,即已知多个匹配好的3D/3D点对,来估计相机的运动
视觉SLAM基础——旋转矩阵、旋转向量、欧拉角与四元数
刚体运动是SLAM的基础,尤其是旋转的几种常用数学表示,即旋转矩阵、欧拉角、旋转向量和四元数,这部分公式比较多,但是很重要。
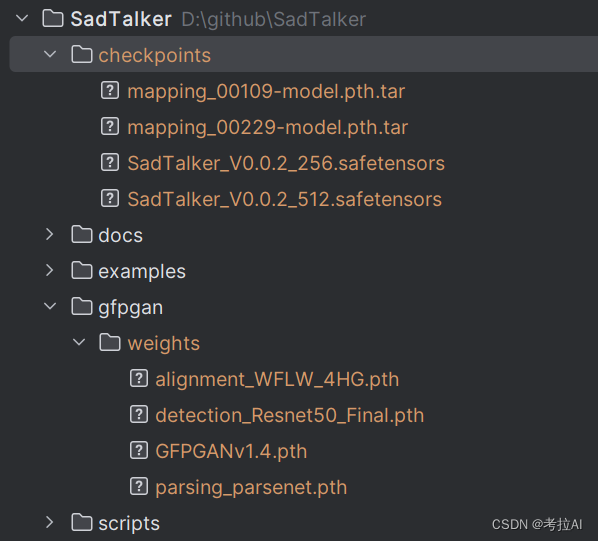
照片会说话?开源AI数字人工具SadTalker环境搭建和使用教程
照片说话,数字人,sadtalker 源码运行环境搭建,整合包获取
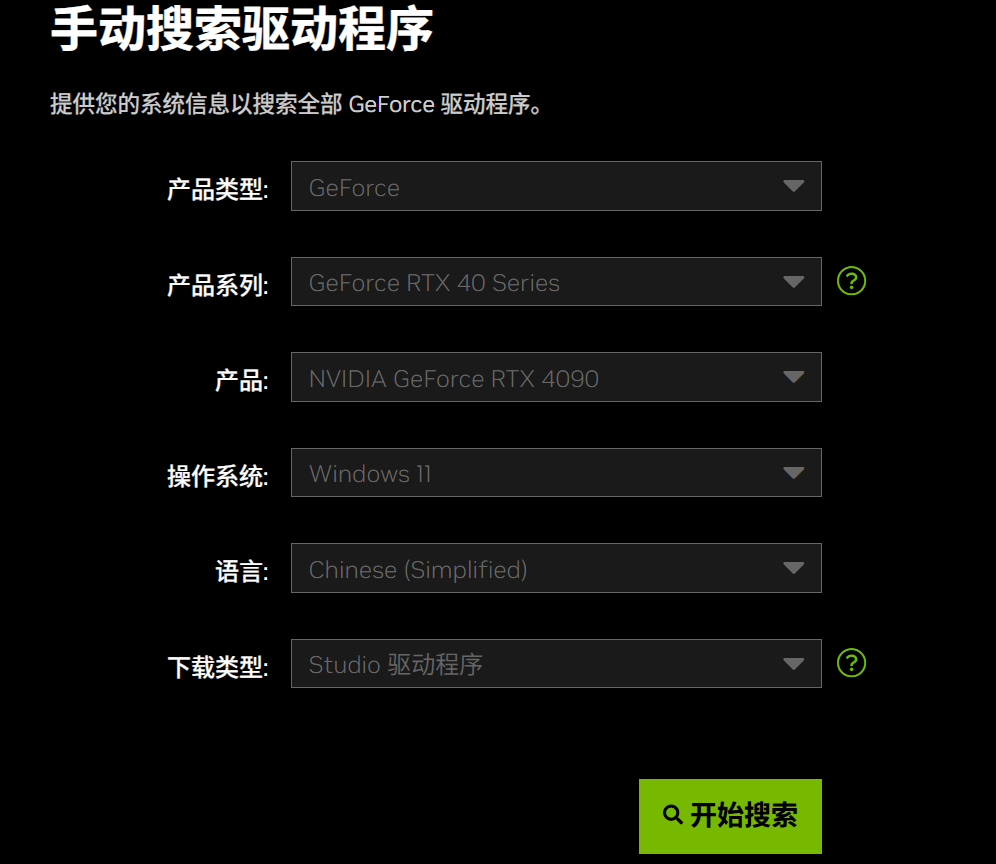
【Win系统】windows系统基操及运行常见问题,包含环境变量设置、终端使用、N卡驱动升级和ffmpeg安装
window基操 环境变量设置 英伟达驱动安装 ffmpeg安装