




- @nisidjndn
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
介绍了如何在Ubuntu系统上使用Miniconda搭建虚拟环境。文章首先指导用户下载和安装Miniconda,接受许可协议并选择安装路径。接着,介绍了如何初始化和激活Miniconda以便自动激活`conda`环境,以及如何手动配置环境变量以确保`conda`命令有效。然后,博客讲解了如何使用`conda`创建一个指定Python版本的虚拟环境,并验证其是否成功激活。最后,文章介绍了如何创建`r
这篇博客介绍了在Linux系统中将Python脚本放到后台运行的几种方法。首先,使用nohup命令可以在关闭终端后保持进程运行,并将输出和错误日志重定向到指定文件。其次,screen和tmux是两个终端复用器,它们允许在多个会话中运行任务,即使SSH连接断开也能保持任务继续运行,并且支持会话的恢复和管理。最后,简单地使用&符号也可以将任务放到后台。

使用vscode编辑python项目时发现,它的相对路径是相对于当前工作根目录来定位的,也就是从工作文件夹的最顶级目录开始查找,而非是从当前执行文件开始查找。这种优先级的设计使得你可以在不同的项目中使用不同的配置,以满足项目的特定要求,同时保持全局的默认设置。etting.json`,这个是对工作区的设置进行修改,也就是对当前项目的设置修改(局部)。因此,工作区级别的设置会覆盖用户级别的设置,以满


这篇博客讨论了分类和回归这两种监督学习任务的主要区别。分类任务的目标是将数据分配到预定义的离散类别中,而回归任务则是预测一个连续数值。文章介绍了两者在输出类型、常用评价指标、应用场景和算法选择上的不同,并列举了常用的分类和回归算法。同时,博客还深入探讨了分类和回归任务在代码实现中的差异,特别是在数据准备、模型输出层的设置、损失函数、评价指标和预测结果的处理方式上。最终,博客提供了详细的分类和回归任

这篇博客讨论了分类和回归这两种监督学习任务的主要区别。分类任务的目标是将数据分配到预定义的离散类别中,而回归任务则是预测一个连续数值。文章介绍了两者在输出类型、常用评价指标、应用场景和算法选择上的不同,并列举了常用的分类和回归算法。同时,博客还深入探讨了分类和回归任务在代码实现中的差异,特别是在数据准备、模型输出层的设置、损失函数、评价指标和预测结果的处理方式上。最终,博客提供了详细的分类和回归任
使用vscode编辑python项目时发现,它的相对路径是相对于当前工作根目录来定位的,也就是从工作文件夹的最顶级目录开始查找,而非是从当前执行文件开始查找。这种优先级的设计使得你可以在不同的项目中使用不同的配置,以满足项目的特定要求,同时保持全局的默认设置。etting.json`,这个是对工作区的设置进行修改,也就是对当前项目的设置修改(局部)。因此,工作区级别的设置会覆盖用户级别的设置,以满
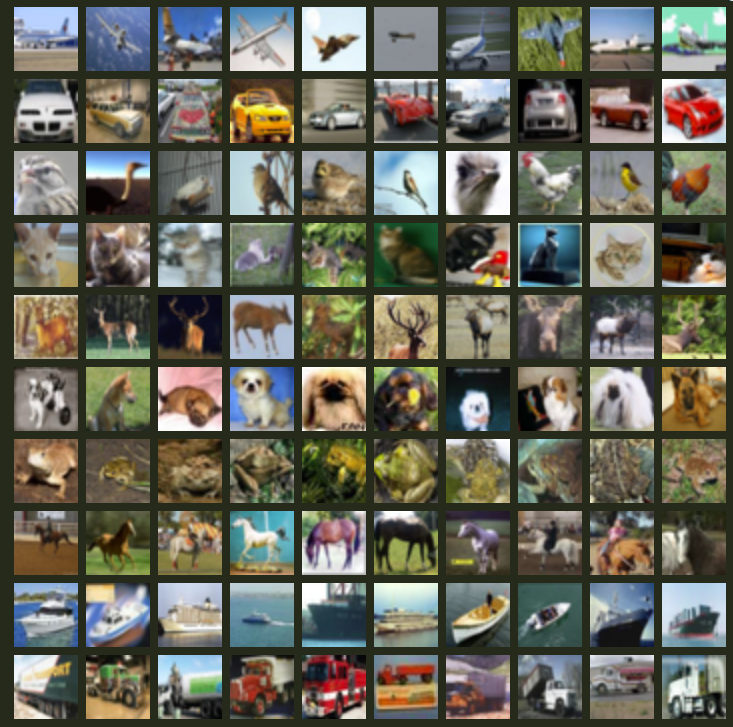
CIFAR-10 数据集是一个广泛使用的图像数据集,具体可见CIFAR-10 和 CIFAR-100 数据集,它包含 60,000 张 32x32 像素的彩色(3 channels)图像,分为 10 个类别,每个类别有 6,000 张图像。飞机 (airplane): 6,000 张汽车 (automobile): 6,000 张鸟类 (bird): 6,000 张猫 (cat): 6,000 张
这篇博客讨论了分类和回归这两种监督学习任务的主要区别。分类任务的目标是将数据分配到预定义的离散类别中,而回归任务则是预测一个连续数值。文章介绍了两者在输出类型、常用评价指标、应用场景和算法选择上的不同,并列举了常用的分类和回归算法。同时,博客还深入探讨了分类和回归任务在代码实现中的差异,特别是在数据准备、模型输出层的设置、损失函数、评价指标和预测结果的处理方式上。最终,博客提供了详细的分类和回归任