- @mftang
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
TensorFlow Lite Micro(TFLM)是一个开源的机器学习推理框架,专门设计用于在资源极度受限的嵌入式系统上运行深度学习模型。面对嵌入式系统严苛的资源约束(通常仅有几十KB的内存)和高度碎片化的硬件生态,TFLM通过基于解释器的独特架构、静态内存分配策略和模块化算子设计,在保持跨平台灵活性的同时实现了极低的运行时开销。本文系统阐述TFLM的设计动机、核心架构、内存管理机制、性能优化

针对STM32F103系列MCU,深入剖析基于DMA的USART收发机制,涵盖DMA控制器架构、传输模式选择、空闲中断原理、缓冲区管理策略及中断优先级设计。提供基于标准外设库与HAL库的双版本完整实现,并讨论工程中常见的性能瓶颈与稳定性问题,给出优化方案,适用于需要高吞吐量、低CPU负载的串口通信场景。

针对直流无刷电机(BLDC)在工业控制中对转速测量的实时性与精度要求,提出一种基于STM32G4系列微控制器高级定时器输入捕获功能的霍尔传感器测速方案。本文首先分析霍尔传感器输出信号特性与电机转子机械角度的关系,推导基于电周期的转速计算公式;其次,详细阐述定时器时基参数、双边沿捕获、数字滤波及溢出补偿的配置方法;然后,给出基于HAL库的完整驱动代码,包括初始化、中断服务与溢出处理机制;最后,通过实

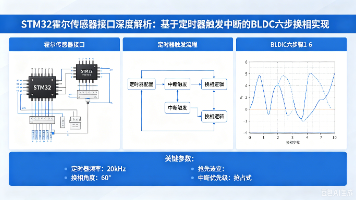
无刷直流电机(BLDC)的精确换相依赖于对转子位置的实时感知。基于霍尔传感器的六步换相法,其性能瓶颈在于从霍尔信号边沿检测到功率器件动作的延迟。本文深入剖析 STM32 定时器的霍尔传感器模式(Hall Sensor Mode) ,揭示其硬件级零延迟换相的底层机制,并提供面向工程实践的高可靠性代码框架与调试方法论。
struct.pack 是 Python 中用于将数据打包成字节流的强大工具,特别适用于处理二进制数据、网络协议、文件格式等场景。通过掌握 struct.pack,可以高效地在 Python 中处理各种二进制数据场景。

Claude Code 是 Anthropic 公司于 2025 年发布的终端型自主编码代理系统。区别于传统的代码补全工具,该系统基于“感知-思考-行动-验证”的智能体循环架构,具备 200K token 的标准上下文窗口(通过 API 可扩展至 100 万 token),能够直接操作文件系统、执行 Shell 命令、管理 Git 仓库及运行测试任务。本文系统阐述 Claude Code 的核心技

本文主要介绍ISLS29035芯片驱动的相关内容,包括ISLS29035芯片的特性,其内部各个寄存器的功能,以及和MCU相连后其时序操作的注意点。还介绍了STM32F103上使用I2C模块进行驱动配置,包括STM32CUBE配置参数,I2C驱动代码,以及使用I2C接口驱动ISLS29035的功能实现方法等内容。
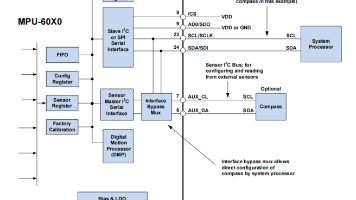
针对MEMS惯性测量单元(IMU)单独使用时航向角易受陀螺仪零偏积分漂移影响、磁力计易受环境硬铁干扰导致精度下降的问题,本文提出并实现了一种基于STM32嵌入式平台的9轴传感器融合姿态解算方法。系统以STM32F4微控制器为核心,通过I²C总线采集加速度计、陀螺仪和磁力计数据,采用椭球拟合算法实现磁力计的硬铁与软铁校准,并引入Mahony互补滤波算法将三轴数据融合为四元数,进而解算出横滚、俯仰和航
针对MEMS惯性传感器在动态姿态测量中陀螺仪积分漂移与加速度计运动干扰的互补性问题,本文系统研究了基于四元数的姿态融合算法。从四元数代数基础出发,严格推导了四元数运动学微分方程及其离散化形式,建立了Mahony互补滤波器的完整数学模型。通过引入比例-积分(PI)反馈机制,利用加速度计的重力场观测对陀螺仪角速度进行闭环校正,实现了高频姿态跟踪与低频姿态基准的协同优化。在STM32F407嵌入式平台上

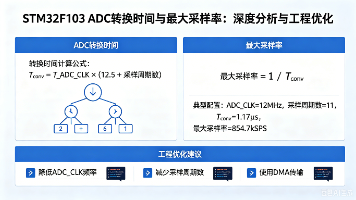
本文系统论述STM32F103系列微控制器内置12位逐次逼近型ADC的转换时间构成与最大采样率制约因素。从SAR ADC的转换时序出发,推导了采样时间、ADC时钟频率与总转换时间的精确数学关系;定量分析了多通道扫描模式、数据传输方式(DMA/中断/轮询)、触发源类型(软件/定时器)对实际可达采样率的影响;结合数据手册电气特性与工程实测数据,给出了不同应用场景下的优化配置方案与设计准则。本文旨在为需