
写文章




- @m0_72207463
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
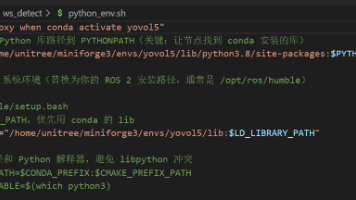
在g1机器人上jeston orin开发板安装好conda环境后,如何指定conda虚拟环境python解释器运行ros2的功能包
(1).创建一个.sh文件,放在利用ros2创建的工作空间ws_detect即可(python_env.sh放在位置可以任意的位置):(2).创建完成之后执行顺序依次为:问题:为何不直接source python.sh然后在进行colcon build:原因可能是:、 等通常安装在系统 ROS 环境下(例如 ),Conda虚拟环境里没有。
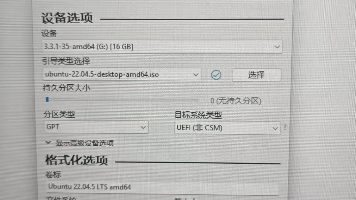
在windows系统上制作启动ubuntu_22.04.5_desktop_amd64.iso启动盘
分区类型:GPT目标系统:UEFI(非CSM)文件系统:FAT32写入模式:ISO模式(推荐)按照上述配置制作的Ubuntu启动盘兼容性最好,也是Ubuntu官方推荐的启动方式。
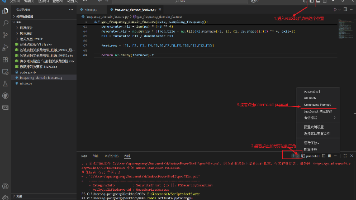
在vscode中如何激活利用anaconda创建虚拟环境的 亲测有效
原理解析:这样操作想当进入上图 中 cmd中 也就是自己 win+r 输入cmd 然后即可进行虚拟环境激活的(可能存在不对)如侵权 请联系我立即删除。
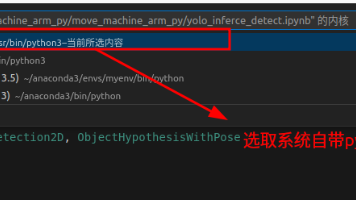
在安装ros2的版本为humble时,系统自带python==3.10.12,最好使用系统自带这个python版本的
可以发现系统自带python版本为3.10.12。4.然后在vscode编辑器中选择,再次选择。
在jeston orin上,安装搜狗输入法
2.安装fcitx输入法框架3.设置系统输入法为fcitx,把ibus改为fcitx4. 设置fcitx开机自启动5. 卸载系统ibus输入法框架。
到底了