- @m0_63485455
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
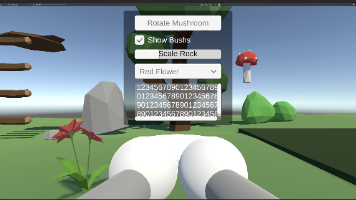
个人学习记录,通过XR Interaction Toolkit示例场景,快速上手PICO基本开发。
这一篇和PICO本身没什么关系,只是记录一下开发过程我们要做一个“从超声设备采集影像数据,一对多地传给XR眼镜终端以及其他可能的设备”应用。发送端是Jetson,由同事负责;接收端XR眼镜端由我负责。同事说视频采集卡例程里给了两种通信协议:RSTP和WebRTC.一开始我尝试用HoloLens2,因为老师和医生们似乎更喜欢OST而不是VST;但是UWP ARM64 媒体栈对 RTSP 支持弱、Mi

摘要:PICO 4 Ultra设备通过Unity SDK 3.4.0版本支持双路相机图像采集,但暂不支持深度传感器访问。开发者需在AndroidManifest.xml声明相机权限,使用PXR_CameraImage类管理图像数据。实现方案包括:1)通过PICO SDK接口枚举并创建相机会话;2)采用NetMQ轻量级传输框架推送RGBA数据至PC;3)PC端Python脚本通过ZeroMQ接收并显

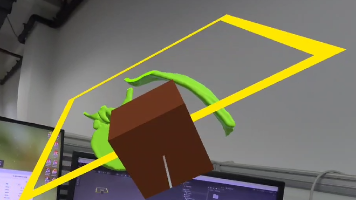
本文介绍了在Unity中实现VR环境下6DoF自由剖切3D模型的方法。通过CrossSection插件和自定义脚本PoseDrivenClippingSection.cs,实现了用手柄抓取切片器实时更新模型剖切效果。关键点包括:1)使用Shader全局参数传递剖切平面信息;2)制作可视化切片器;3)设置XR交互系统,让模型和切片器可被抓取;4)调整碰撞层避免干扰。相比MRTK方案,该方法提供了更灵
之前使用yolov5和yolov9,它们在训练时数据集与代码的目录是这样的:以coco128.yaml为例但是yolov8是这样的datasets和代码放在一起,移植的时候很不方便。虽然也可以把path改为绝对路径,移植的时候还要改。

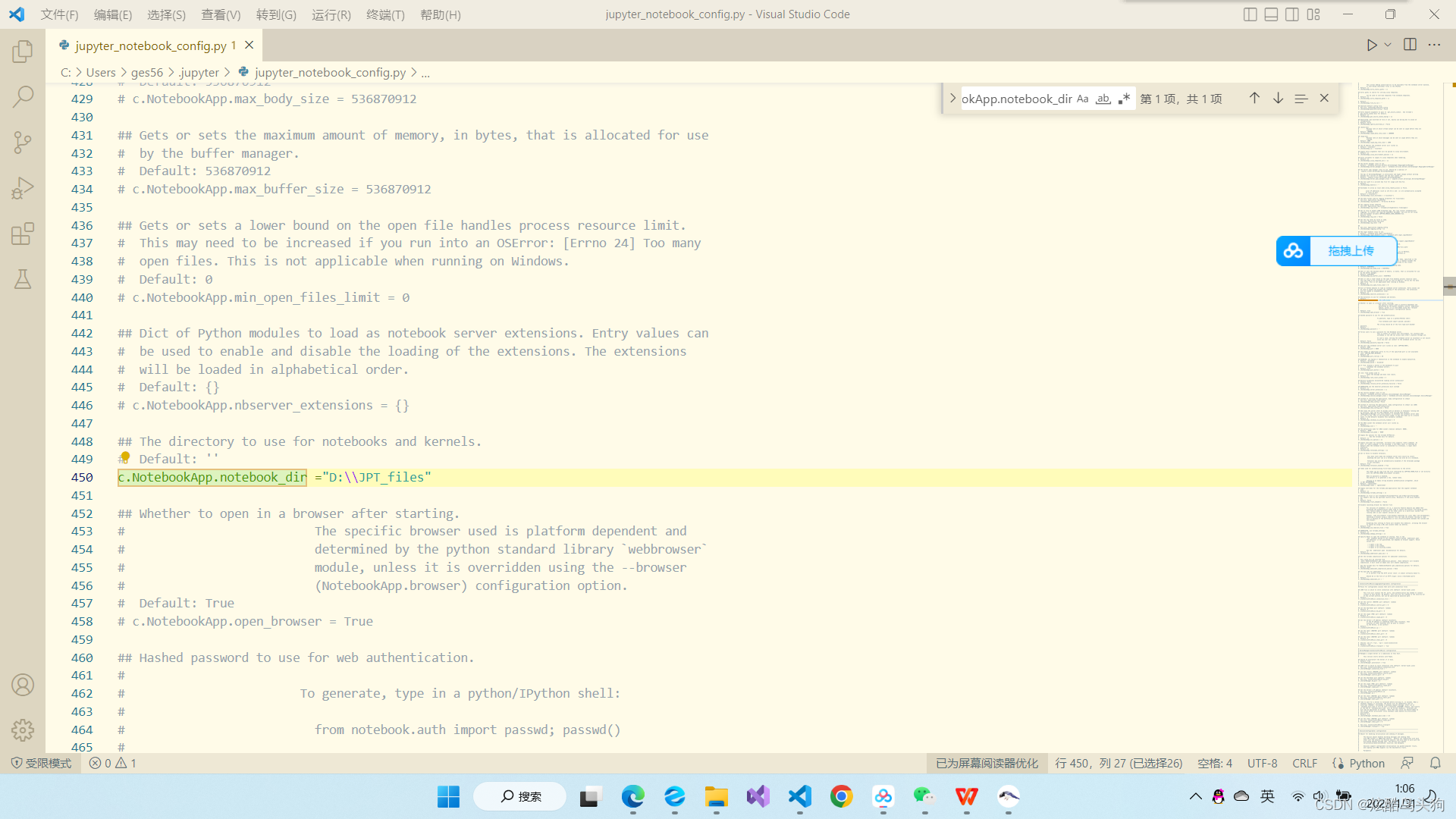
python环境下的方法:1准备合适版本的python,matlab;2安装jupyter notebook;3在jupyter notebook上使用matlab