




- @m0_52011717
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
手工焊接建议多次练习废板,熟练掌握热风枪操作技巧。对于高价值芯片,推荐使用专业返修台或委托专业厂家代工。LGA封装焊接需严格把控。

本文介绍了STM32L431RCT6驱动ADS124S06模数转换器的开发过程。作者详细讲解了SPI通信接口配置(CS/SCLK/DIN/DOUT/DRDY引脚定义)、寄存器读写函数实现、数据转换流程及24位ADC数据处理方法。重点包括:初始化配置、通道选择、校准流程、单次/连续转换模式控制,以及24位有符号数据到电压值的转换公式。开发过程中遇到的时序问题和解决方案也做了说明,提供了完整的底层驱动
USB Audio Class(UAC)协议定义了通过USB接口传输音频数据的标准格式和控制机制。其数据格式涉及描述符配置、音频流传输格式及控制请求结构。通过以上数据格式的配置与解析,开发者可实现符合UAC标准的USB音频设备,确保与主机系统的兼容性和高性能音频传输。详细规范可参考USB-IF发布的。USB Audio Class分为。定义设备能力,并通过。
下面是一个使用MATLAB进行神经网络建模的案例,该案例涉及使用神经网络来逼近一个未知系统的输入输出关系。这个案例与您提到的学习资料中的实例类似,但我会简化并解释每个步骤。假设我们有一组输入和输出数据,我们希望通过建立一个神经网络模型来逼近这些数据之间的关系。清理工作区:定义输入和输出向量:创建神经网络:配置网络:训练网络:模拟网络:评估性能:可视化结果:解释在这个案例中,我们首先定义了输入向量和

在选择GPU算力租用平台时,需要考虑多个因素,包括平台的稳定性、服务质量、价格、GPU规格和性能,以及是否满足特定的计算需求等。在选择时,建议综合考虑平台的稳定性、服务质量、价格、GPU规格和性能等因素,并结合自身的项目需求进行选择。同时,可以关注平台的优惠政策和客户支持,以确保获得更好的服务体验。

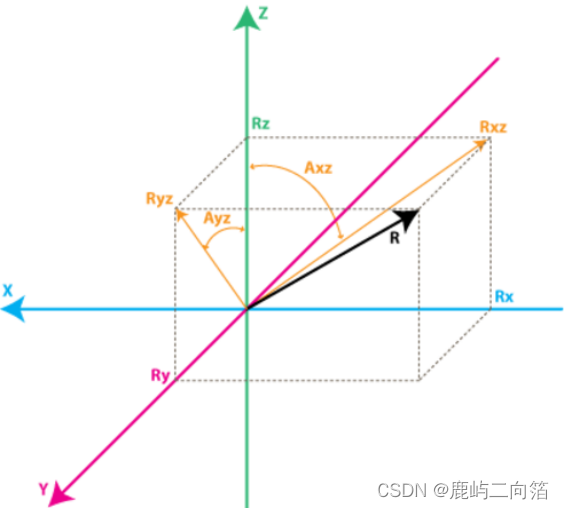
加速度计:加速度计,可以测量加速度,包括外力加速度和重力加速度,因此,当被测物体在静止或匀速运动(匀速直线运动)的时候,加速度计仅仅测量的是重力加速度,而重力加速度与 R 坐标系(绝对坐标系)是固连的,通过这种关系,可以得到加速度计所在平面与地面 的角度关系 也就是横滚角和俯仰角。经典互补滤波算法基本原理是充分利用加速度计提供的低频角度信号和陀螺仪提供的高频角速度信号,对加速度计进行低通滤波,对陀
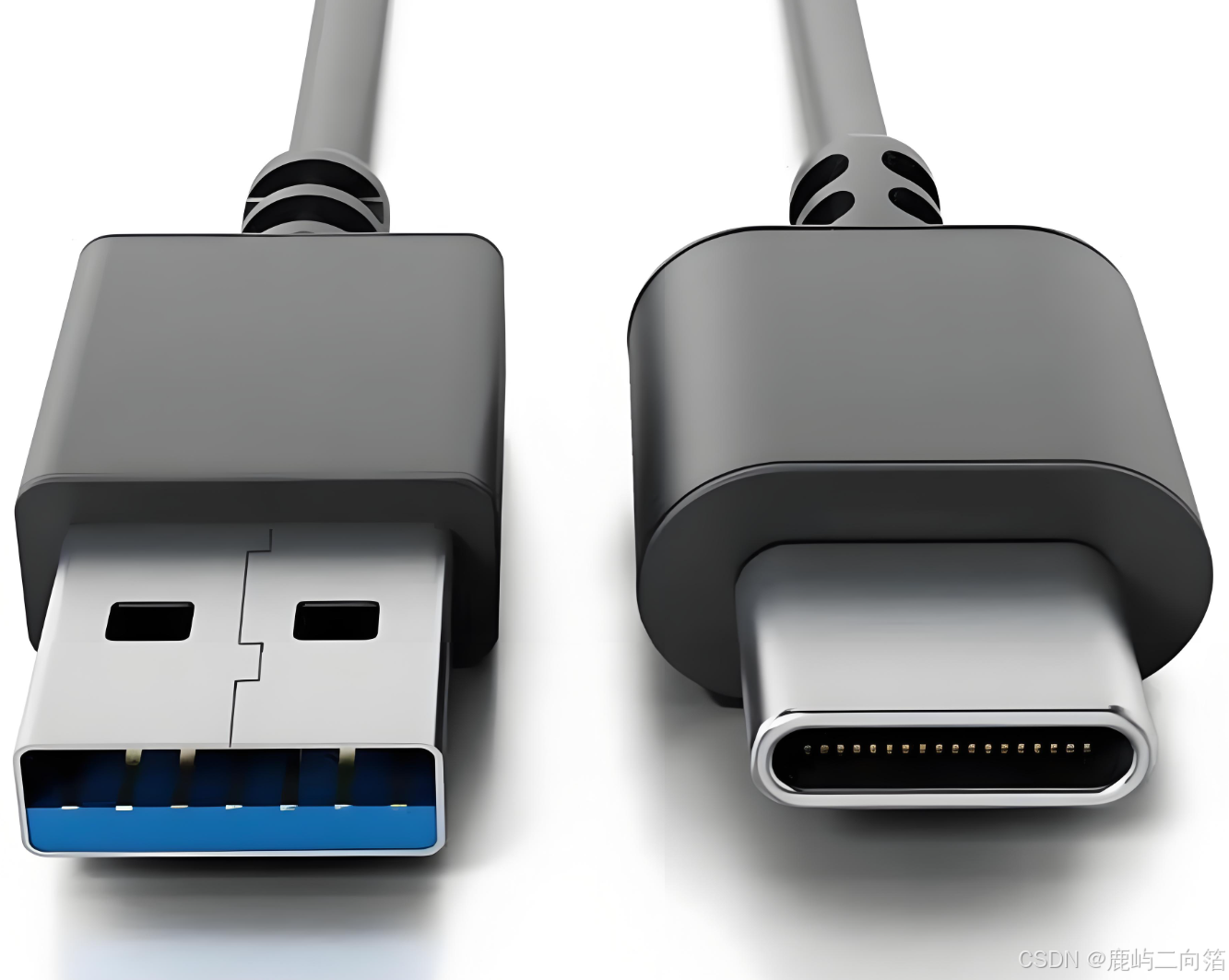
通过以上步骤,可快速验证 STM32F103C8T6 的 USB 接口功能。如需完整代码或进一步调试,请参考 STM32CubeMX 生成的示例工程。的 USB 接口测试程序开发指南,以。
上电的从站定时发送状态报文(心跳报文),以便于主站确认从站是否故障、是否脱离网络。超过诺干次心跳消费时间没有收到从站的心跳报文,则认为从站已经离线或者损坏。为复位节点应用层(让节点的应用恢复初始状态,比如列车门都恢复打开状态);从站上线后,为了提示主站它已经加入网络(便于热插拔),或者。一个军队一样,要令行禁止,才能达到稳定、高效的目标。):节点中的应用程序复位(开始),比如开关量输。干扰,导致节

**反馈控制**:虽然优化的是未来控制序列,但实际执行时是基于最新测量的反馈信息进行校正的,结合了前馈控制的前瞻性和反馈控制的稳定性。- **处理约束**:MPC能够自然地纳入状态变量和控制输入的约束条件,如物理限制或安全要求,这是其在工程应用中的一大优势。- **滚动优化**:在每个时间点重新优化,保证了控制策略的实时性和适应性。- **工业过程控制**:如化工厂、炼油厂中的温度、压力控制。-

本文介绍了STM32L431RCT6驱动ADS124S06模数转换器的开发过程。作者详细讲解了SPI通信接口配置(CS/SCLK/DIN/DOUT/DRDY引脚定义)、寄存器读写函数实现、数据转换流程及24位ADC数据处理方法。重点包括:初始化配置、通道选择、校准流程、单次/连续转换模式控制,以及24位有符号数据到电压值的转换公式。开发过程中遇到的时序问题和解决方案也做了说明,提供了完整的底层驱动