




- @m0_47334080
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
鸿蒙的ArkUI和Android的Compose,iOS的SwiftUI,甚至包括Flutter都是天生支持mvvm,只不过它们的vm都是状态驱动,比起mvvm更接近mvi,这也是近年web平台主流的写法和思路,虽然命名不一样,但本质上是相通的,思路都是:状态与UI绑定,数据与状态相连,业务操作数据就等于操作UI,这样数据可以持久化来达到“保存/恢复界面状态”的目的,也可以通过记录数据的变化实现“
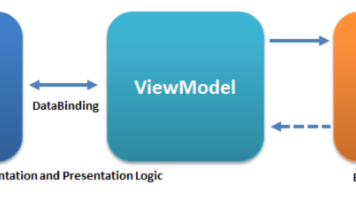
鸿蒙的ArkUI和Android的Compose,iOS的SwiftUI,甚至包括Flutter都是天生支持mvvm,只不过它们的vm都是状态驱动,比起mvvm更接近mvi,这也是近年web平台主流的写法和思路,虽然命名不一样,但本质上是相通的,思路都是:状态与UI绑定,数据与状态相连,业务操作数据就等于操作UI,这样数据可以持久化来达到“保存/恢复界面状态”的目的,也可以通过记录数据的变化实现“
目前车载网络通信越来越复杂,通信总线、协议多种多样,网关作为信息交互的载体,主要通过报文路由转发、报文过滤、信号重组等方式实现不同网段、不同协议间的信息交互;在复杂的车载网络中,网关通信路由转发功能具有非常重要的作用,通信路由功能的可靠性进行验证尤为重要。
另一方面是考虑功能层面的需求,从用户,车辆,使用场景三者关系出发,梳理出用户在特定场景下使用该功能的期望表现,即功能的UseCase,基于UseCase分析,得到功能定义的需求项,包含功能性需求,非功能性需求,约束性需求。将应用程序抽象成服务,需要综合考虑多方面的因素,如技术,成本,安全等。SOA的目的是建立驱动汽车平台不断升级的架构,服务架构需要深入理解业务本质,业务本质是根基,根基打好了,我们
随着汽车互联网时代的来临,消费者对驾驶连接性的体验度日益关注,导致了人们对汽车通讯数据传输速度的要求不断提高,因此各种新车载通讯技术也应运而生。其中,汽车以太网因成熟的设计开发技术以及网联智能化等优势,正在被越来越多的OEM所关注,且逐步应用于各类最新车型中。(BroadR-Reach:单对绞线车载以太网)目前,市场对汽车以太网节点的开发需求不断增长,相应的测试需求也呈上升趋势,以下与大家共同分享
随着汽车以太网的快速发展,很多ECU都使用了DoIP进行诊断和刷写,那如何使用DiVa测试 UDS On DoIP呢? 使用DiVa进行UDS On CAN测试大家都很熟悉了,UDS On DoIP测试与CAN类似,需要注意的就是CANoe的配置,这期小编来分享一些测试心得。1.创建一个带以太网通道的CANoe工程。注:你的CANoe必须带Ethernet Option2.配置通道需要注意的两种情
遥想十几年前,CAN总线是一门多么高深的技术啊!每天背着电脑,全国各地到处跑,跟人介绍CAN基础:“CAN指的是控制器局域网络,吧啦吧啦吧啦......”。再看看现在,出门你说你懂CAN总线,感觉就像个小屁孩似的,不说点什么SOA、以太网、软件定义汽车、A核M核、中央计算单元,你都不好意思说你是汽车电子圈里混的。感觉就是那么一瞬间的事:忽如一夜春风来,SOA遍地开。奇了怪了,汽车电子的圈子里短时间
随着智能网联汽车的发展,具有大带宽、传输速度快等优势的车载以太网,可以作为下一代EEA的骨干网,而准确的时序和可靠安全的数据传输在汽车环境中至关重要。时间敏感网络作为传统以太网的扩展可以保证车载以太网的时间同步、低延迟传输和可靠性,然而很少有讨论TSN的安全机制,小怿今天就和大家聊一聊TSN协议之安全协议(802.1Qci)的那些事儿。在大带宽需求的背景下,现代汽车的网络架构将是传统总线(如CAN

前不久小怿介绍了一款高效CAN总线报文解析工具——Scope,不知道大家还记不记得呢?今天小怿接着为大家介绍经常与之配合进行ECU的CAN网络一致性测试的工具——VH6501。为了测试一个系统在信号干扰和失效的情况下是否仍能稳定工作,需要一种仪器用来面向对象再现CAN总线信号、总线物理属性和逻辑电位(隐形或显性)的干扰,VH6501的功能就是如此,因此它也有一个更通俗的名字——干扰仪。图1VH65
由于CRC_DEL位固定位隐性位,ACK_Slot位固定位显性位,当ACK_Slot显性位移到DUT采样点位置时,就会被DUT采样到并判定CRC_DEL位为显性位,DUT检测为格式错误,就会向总线发送错误帧,测试工具检测到DUT发送的错误帧时,则结束测试,并记录调整的次数为n,然后根据调整次数计算出DUT的采样点。CAN总线对逻辑信号的识别依赖于信号电平,若CANH和CANL线上电平过高或过低,都
