




- @m0_37482190
简介
我是鲲志,前阿里工程师,现任 Web3 后端研发,专注 Java、Go、区块链、云原生等方向。技术布道、内容创作、线下组织,是我长期热爱的方向。我分享区块链、云原生、AI 工具和开发者实战经验,也发起 CSDN Meetup、Hackathon、写作共创等活动,同时我也是CSDN 杭州社区主理人、周周黑客松主理人和杭州AI工坊联创,协助开发者连接资源、内容和影响力。我想构建的不只是技术体系,还有彼此成就的开发者社区。如果你也热爱表达和共创,欢迎加入,一起共创,共成长!
擅长的技术栈
可提供的服务
后端、运维、Web3开发、开发资源链接、活动支持与传播等
【MetaMask升级引发的Web3开发陷阱:双核AI模型救场实录】 当用户通过MetaMask签名交易成功后,后端却无法监听到链上事件,传统代码排查陷入死胡同。作者耗费一天无果,最终CodeX模型指出关键:MetaMask升级后,交易被包装为"Redeem Delegations"方法,导致原始Deposit事件被隐藏。 核心发现: 国产模型(如DeepSeek)在通用场景性价比高,但对西方We

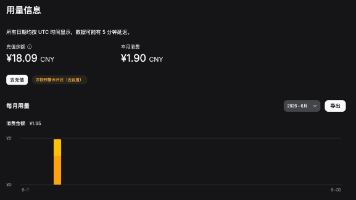
一个紧急项目让我烧光了所有AI编程工具的额度,却意外发现了一套时均不到5毛钱的终极方案
2026深圳Rebuild-Z × GEIA AI黑客松聚焦具身智能落地困境,通过48小时线下驻场开发探索技术创新路径。活动围绕"先有场景还是先有技术"展开A/B测试,汇聚跨领域人才破解产业痛点,提供硬件支持、资本对接等全链路资源。设有AI+具身智能和AI+X两大赛道,包含远程预开发与线下冲刺阶段,优秀项目将获得持续商业赋能。活动旨在突破"插件式改造"局限,重构AI时代的产业运行规则。
2026深圳Rebuild-Z × GEIA AI黑客松聚焦具身智能落地困境,通过48小时线下驻场开发探索技术创新路径。活动围绕"先有场景还是先有技术"展开A/B测试,汇聚跨领域人才破解产业痛点,提供硬件支持、资本对接等全链路资源。设有AI+具身智能和AI+X两大赛道,包含远程预开发与线下冲刺阶段,优秀项目将获得持续商业赋能。活动旨在突破"插件式改造"局限,重构AI时代的产业运行规则。
【MetaMask升级引发的Web3开发陷阱:双核AI模型救场实录】 当用户通过MetaMask签名交易成功后,后端却无法监听到链上事件,传统代码排查陷入死胡同。作者耗费一天无果,最终CodeX模型指出关键:MetaMask升级后,交易被包装为"Redeem Delegations"方法,导致原始Deposit事件被隐藏。 核心发现: 国产模型(如DeepSeek)在通用场景性价比高,但对西方We
AI编程终极扫盲指南 本文系统梳理AI编程核心概念,帮助开发者快速掌握必备知识: 基础概念解析 Token:AI处理的最小文本单位,1Token≈0.75英文单词/0.5-1汉字,直接影响计费和上下文限制 上下文长度:模型的"记忆容量",主流模型1-2M Token(可处理2000+页代码) 推理模式:标准推理(快/便宜)vs 思维链推理(慢/贵但适合复杂问题) API调用要点 API Key:调
AI编程终极扫盲指南 本文系统梳理AI编程核心概念,帮助开发者快速掌握必备知识: 基础概念解析 Token:AI处理的最小文本单位,1Token≈0.75英文单词/0.5-1汉字,直接影响计费和上下文限制 上下文长度:模型的"记忆容量",主流模型1-2M Token(可处理2000+页代码) 推理模式:标准推理(快/便宜)vs 思维链推理(慢/贵但适合复杂问题) API调用要点 API Key:调
OpenAI在新加坡设立首个海外应用AI实验室,聚焦前线部署工程师(FDE)岗位,计划投资16亿元并招募200名技术专家,推动AI技术在实际场景中的落地。FDE需具备全栈开发、客户对接和风险管控能力,年薪可达40万美元以上。新加坡凭借前瞻性政策和完整AI生态,吸引OpenAI、Google、NVIDIA同日布局。国内案例如识渊科技和金珵科技已通过FDE模式在制造业实现技术突破,验证了AI落地的商业
一个紧急项目让我烧光了所有AI编程工具的额度,却意外发现了一套时均不到5毛钱的终极方案
【MetaMask升级引发的Web3开发陷阱:双核AI模型救场实录】 当用户通过MetaMask签名交易成功后,后端却无法监听到链上事件,传统代码排查陷入死胡同。作者耗费一天无果,最终CodeX模型指出关键:MetaMask升级后,交易被包装为"Redeem Delegations"方法,导致原始Deposit事件被隐藏。 核心发现: 国产模型(如DeepSeek)在通用场景性价比高,但对西方We