




- @lbr15660656263
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
循环神经网络(Recurrent Netural Network,Rnn)是一类具有短期记忆能力的神经网络。在RNN中,神经元不但可以接受其他神经元的信息,也可以接受自身的信息,形成具有环路的网络结构,RNN由此得名。循环神经网络已经被广泛应用在语音识别、语言翻译以及图片描述等任务上。为了处理时序数据并利用其历史信息,我们需要让网络具有短期记忆能力。而前馈网络是一种静态网络,不具备这种记忆能力。R
通过 堆叠两层3 × 3 3\times33×3的卷积核可以替代一层5 × 5 的卷积核,堆叠三层 3 × 3 的卷积核替代一层 7 × 7 的卷积核,可以看出,大卷积核完全可以由一系列 的3 × 3 卷积核来替代,那能不能再分解得更小一点呢?从上图可以看出,计算量主要来自高维卷积核的卷积操作,因而在每一个 卷积前先使用1 × 1卷积核将输入图片的feature map维度先降低,进行信息压 缩,

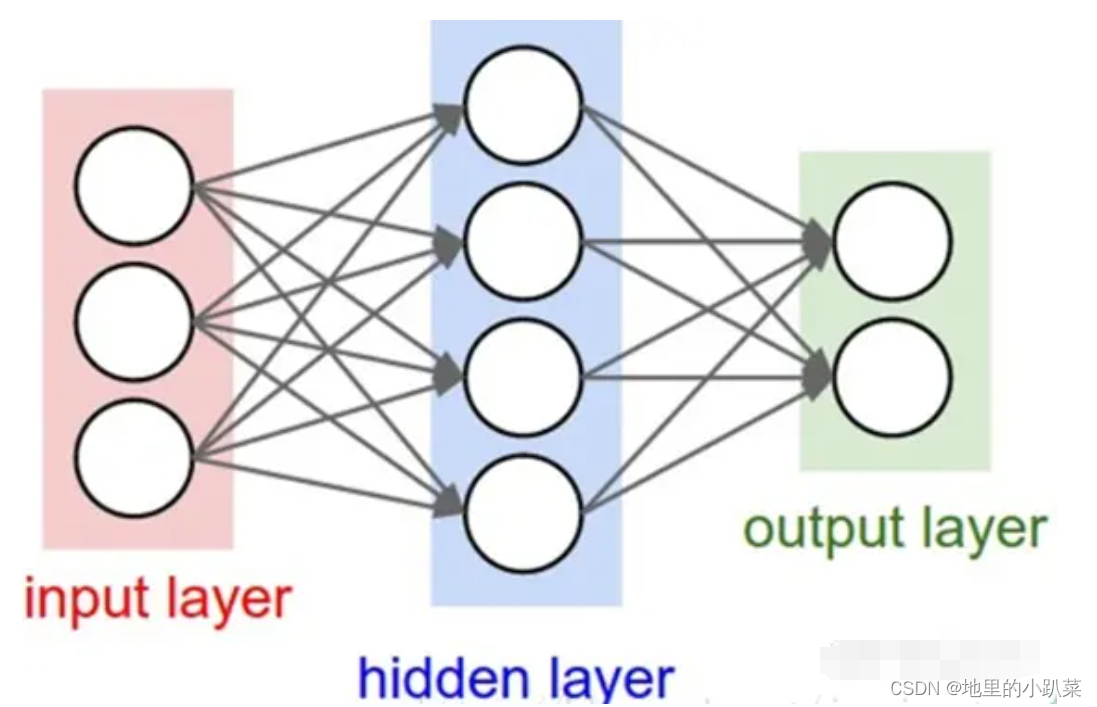
人工智能是让机器获得像人类一样具有思考和推理机制的智能技术,这一概念最早出现在 1956 年召开的达特茅斯会议上。其中深度学习可以理解为神经网络。刚开始只有神经网络的概念,随着神经网络的层数增加,就逐渐将神经网络叫做深度学习。神经网络的发展历程大致分为浅层神经网络阶段和深度学习阶段。
迁移学习(Transfer Learning)是一种机器学习方法,就是把为任务 A 开发 的模型作为初始点,重新使用在为任务 B 开发模型的过程中。迁移学习是通过 从已学习的相关任务中转移知识来改进学习的新任务,虽然大多数机器学习算 法都是为了解决单个任务而设计的,但是促进迁移学习的算法的开发是机器学 习社区持续关注的话题。迁移学习对人类来说很常见,例如,我们可能会发现 学习识别苹果可能有助于识别

循环神经网络(Recurrent Netural Network,Rnn)是一类具有短期记忆能力的神经网络。在RNN中,神经元不但可以接受其他神经元的信息,也可以接受自身的信息,形成具有环路的网络结构,RNN由此得名。循环神经网络已经被广泛应用在语音识别、语言翻译以及图片描述等任务上。为了处理时序数据并利用其历史信息,我们需要让网络具有短期记忆能力。而前馈网络是一种静态网络,不具备这种记忆能力。R
人工智能是让机器获得像人类一样具有思考和推理机制的智能技术,这一概念最早出现在 1956 年召开的达特茅斯会议上。其中深度学习可以理解为神经网络。刚开始只有神经网络的概念,随着神经网络的层数增加,就逐渐将神经网络叫做深度学习。神经网络的发展历程大致分为浅层神经网络阶段和深度学习阶段。
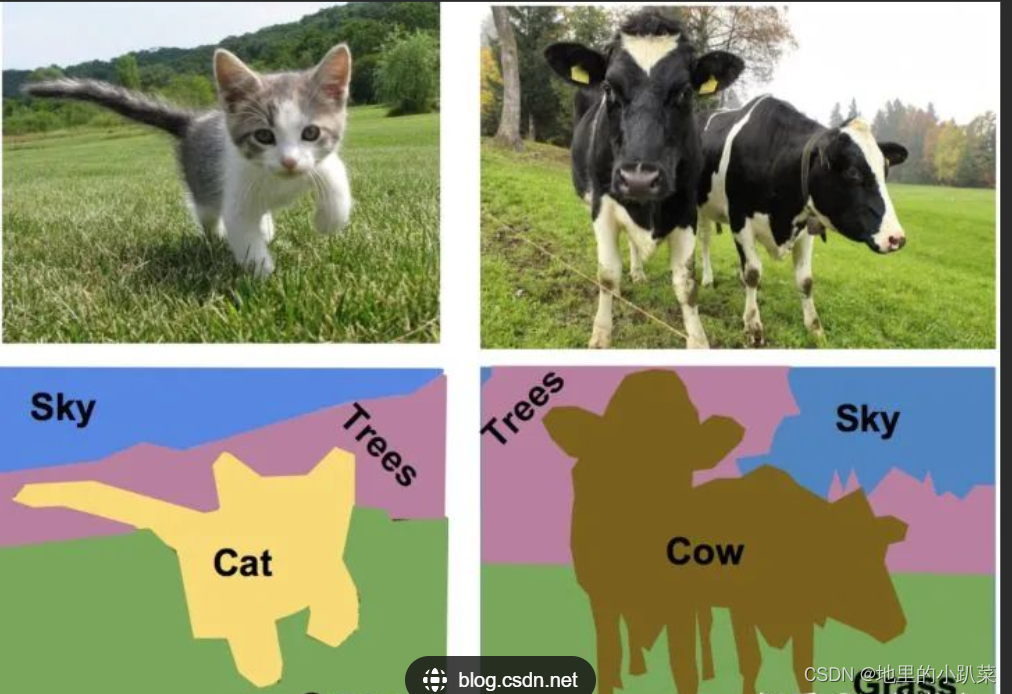
分类最终体现在对每个潜在框分类的11channel上,每个channel代表一个 分类,取值最大的channel作为最终分类;位置信息会用4个值来保存:被分类 的物体中它的框的坐标则为左上角的x和y坐标,以及宽和高的尺寸。对于语义分割来说,它提供的信息中位置信息和分类信息是有重叠的,即 通过标记每个像素的分类,同时也达到提供位置信息。目标检测的任务是对输入的图像进行物体检测,标注物体在图像上的位
2010年至2020年二次担任美国视觉、认知科学、AI领域跨学科合作项目MURI首席科学家;朱松纯的主要研究包括通用人工智能基础、计算机视觉、统计建模与计算、认知科学、机器学习、自主机器人等,长期致力于构建人工智能科学的统一数理框架( [3])。朱松纯(Song-Chun ZHU),1968年出生于湖北鄂州( [22]),博士,计算机视觉专家、统计与应用数学家、人工智能专家,( [18]),并当选
选择适合的算法取决于具体的问题、数据的特性和性能要求,通常需要根据问题的具体情况来选择和调整适合的算法。另外,个人的习惯也会影响对算法的选择。为了方便非专业的朋友阅读,我会从算法分类到主流算法举例来展开,预计20分钟的阅读,你会大概对众多繁复的机器学习算法有一个基础认识,了解当下流行的算法应用场景。NLP的应用主要包括:对话系统和聊天机器人(如GPT-3),内容推荐和个性化,自然语言理解(NLU)
通过 堆叠两层3 × 3 3\times33×3的卷积核可以替代一层5 × 5 的卷积核,堆叠三层 3 × 3 的卷积核替代一层 7 × 7 的卷积核,可以看出,大卷积核完全可以由一系列 的3 × 3 卷积核来替代,那能不能再分解得更小一点呢?从上图可以看出,计算量主要来自高维卷积核的卷积操作,因而在每一个 卷积前先使用1 × 1卷积核将输入图片的feature map维度先降低,进行信息压 缩,