




- @kalvin_y_liu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
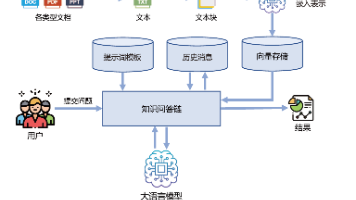
本文梳理了LangChain、Ollama、Dify、RAGFlow四大LLM工具的定位与关系。全景图显示技术栈分为四层:基础设施层、模型服务层(Ollama/云端API)、开发框架层(LangChain)、应用平台层(Dify/RAGFlow)。LangChain是代码级开发框架,提供灵活但复杂的编程接口;Ollama专注本地模型运行;Dify为低代码应用构建平台;RAGFlow则专精RAG场景
本项目基于视觉大模型与机器人集成,实现多站点智能分拣系统。系统核心功能包括手眼标定、视觉识别抓取和多站点任务调度,支持AGV联动。采用Orbbec相机和JAKA机器人,通过配置文件灵活设置分拣参数。主要技术亮点: 增强型手眼标定模块,支持多尺度棋盘格检测和亚像素优化 智能分拣流程,实现自动识别、抓取和放置一体化 多站点协同调度,支持不同操作模式配置 完善的标定验证机制,确保坐标转换精度 系统环境配
在实现智能制造的过程中,制造系统的自动化水平代表一个国家制造业发达程度。智能控制是指在无人干预的情况下能自主地驱动智能机器实现控制目标的自动控制技术。(特征:机器换人)1)数控加工设备2)工业机器人3)生产线自动化控制设备(智能控制器、智能终端、智能识别等)

本文介绍了机器人调度系统的关键技术方案,包括V2X近场协同调度和云端全局调度两种模式,详细阐述了机器人会车避让的两种处理方式(独享区域设置和自动避让触发),以及单向/双向行驶路径配置。系统采用RCS机器人调度控制系统,支持多机型混合调度、动态路径规划和状态监控等功能,基于VDA5050标准协议实现设备互联互通。文章还介绍了复杂场景下的任务管理机制,包括任务优先级设置、排队规则和异常处理等,为高密度
介绍RAG的工作流程,包括离线阶段和询问阶段。RAG工程化:如何将RAG技术应用于实际项目,包括文档加载、预处理、向量存储等。架构与功能:介绍LlamaIndex的架构,包括数据连接器、文档节点、查询引擎等。核心概念:介绍LangGraph的核心概念和基础组件。这份文件是一份非常全面的AI大模型应用技术培训资料,涵盖了从模型训练、微调、量化、部署到具体项目应用的多个方面。它适合有一定AI基础的技术
【代码】企业微信设置机器人通过winform提醒WxWorkBOT。

摘要: “聚森智能”AI烹饪机器人项目提出一套全自动中餐烹饪系统,通过五大核心技术课题实现无人化生产。 多食材抓取系统:基于3D视觉与柔性末端执行器,抓取成功率≥99.5%。 AI视觉质检:定位精度±0.5mm,实现食材分类与成品质量检测。 仿生切配单元:机械臂力控切割,尺寸误差≤±0.5mm。 柔性协作系统:机械臂与炒锅无缝衔接,单菜流程≤180秒。 中央调度系统:数字孪生监控,支持多任务并行与
人工智能赋能产业大赛备战指南与赛事信息摘要 【参赛建议】 研读赛事规则,组建跨学科团队 聚焦六大技术赛道(机器人/汽车/芯片等) 开发创新性AI解决方案原型 准备商业计划与路演展示 【赛事亮点】 分创新/初创/成长三组别 最高2000万项目支持+30万奖金 往届优秀案例:医疗AI配体筛选、飞行机器人等 推动AI与制造业深度融合 【关键信息】 报名截止:2025年10月 需满足学历、创业经历等七项条
LUMI大模型分拣机器人应用摘要 本项目基于视觉大模型与机器人集成,实现多站点分拣、手眼标定、智能检测与抓取功能。核心功能包括: 多站点调度:通过multi_station_demo.py实现AGV与机器人协同作业 视觉检测:visualDetect_ali.py支持自动/手动模式的目标识别与抓取 手眼标定:采用棋盘格标定法,通过AutoCalibProccess.py采集数据并计算相机-机器人坐
本文梳理了具身智能、智能机器人和人形机器人的概念区别及相互关系。具身智能是人工智能的重要分支,强调智能体通过物理实体与环境交互,实现感知、认知、决策和行动一体化,其表现形式多样。智能机器人是具身智能的一种具体应用,需具备物理身体和与物理世界交互的能力。人形机器人则是智能机器人的高级形态,模仿人类外形和行为。专家指出,人形机器人虽具心理亲近感,但技术难度大、成本高;而具身智能更注重实际功能,不局限于