




- @dxs93
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
相信大家在做项目的时候经常遇到位置向xyz偏移,没有必要去示教每个点位,需要程序偏移指令,几分钟解决正在上传…

关于埃斯顿机器人文件导出或者日志导出,登录模式,选择高级设置,控制器备份恢复。选择U盘导入地址,点击导出,等待时间30秒就可以查看文件格式和系统日志。
如果程序删除错误或者误删除,选择右下角撤销。打开文件,选中需要删除的程序,选择编辑。选择需要注释的程序,点击修改。输入管理员模式,输入密码。
等待一组数字量输入指令,用于多个输入数字量的指示!DO8421(9.17.0)该指令含义为将9-17端口的虚信号输出为0(图1)(CALL指令)子程序调用指令,用于程序中调用子程序(SetSimDO指令)设置虚拟数字量输出指令,用于程序中设置虚拟输出指令!

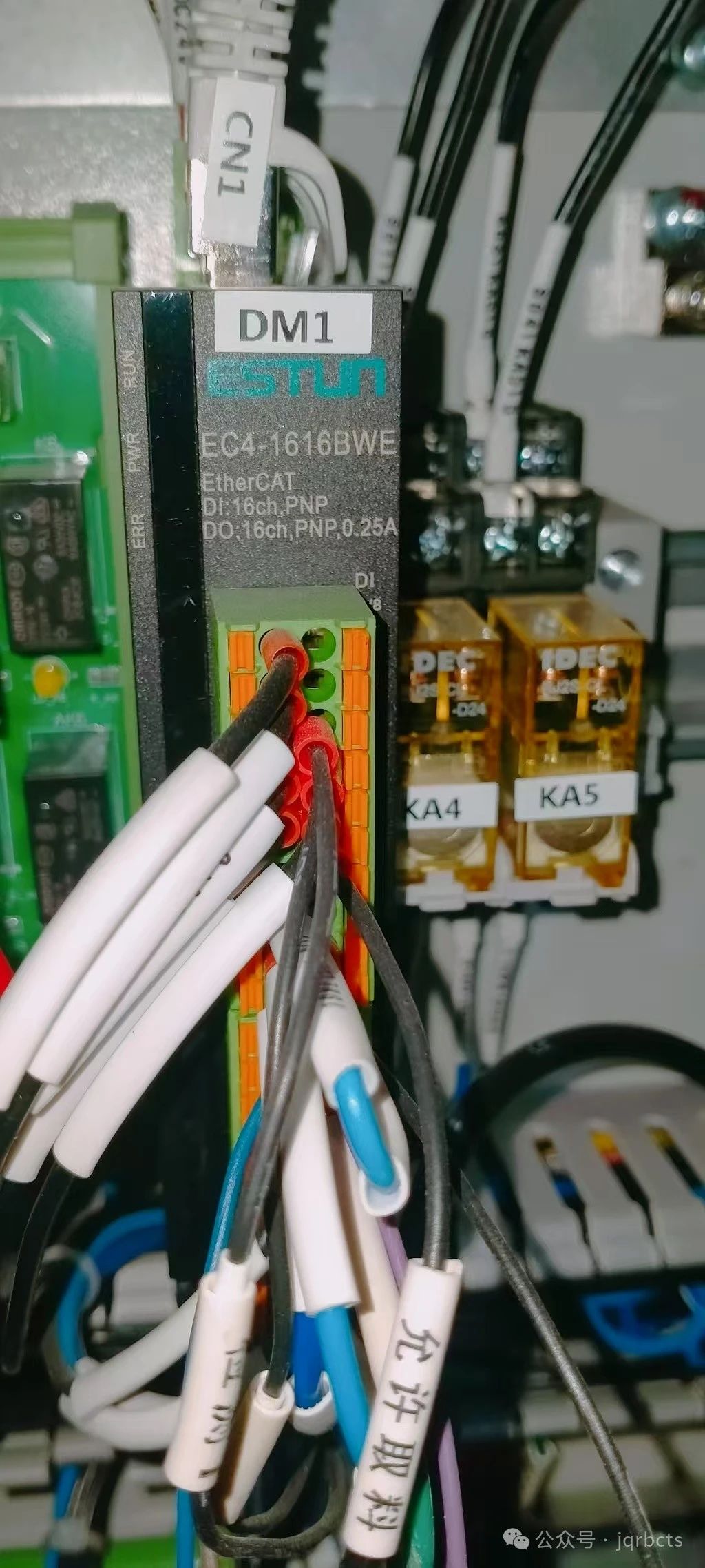
关于埃斯顿机器人报警E-CAT7412代码,可能是EC4-161模块配置问题导致报警。检查一下cn1网线是否有问题。
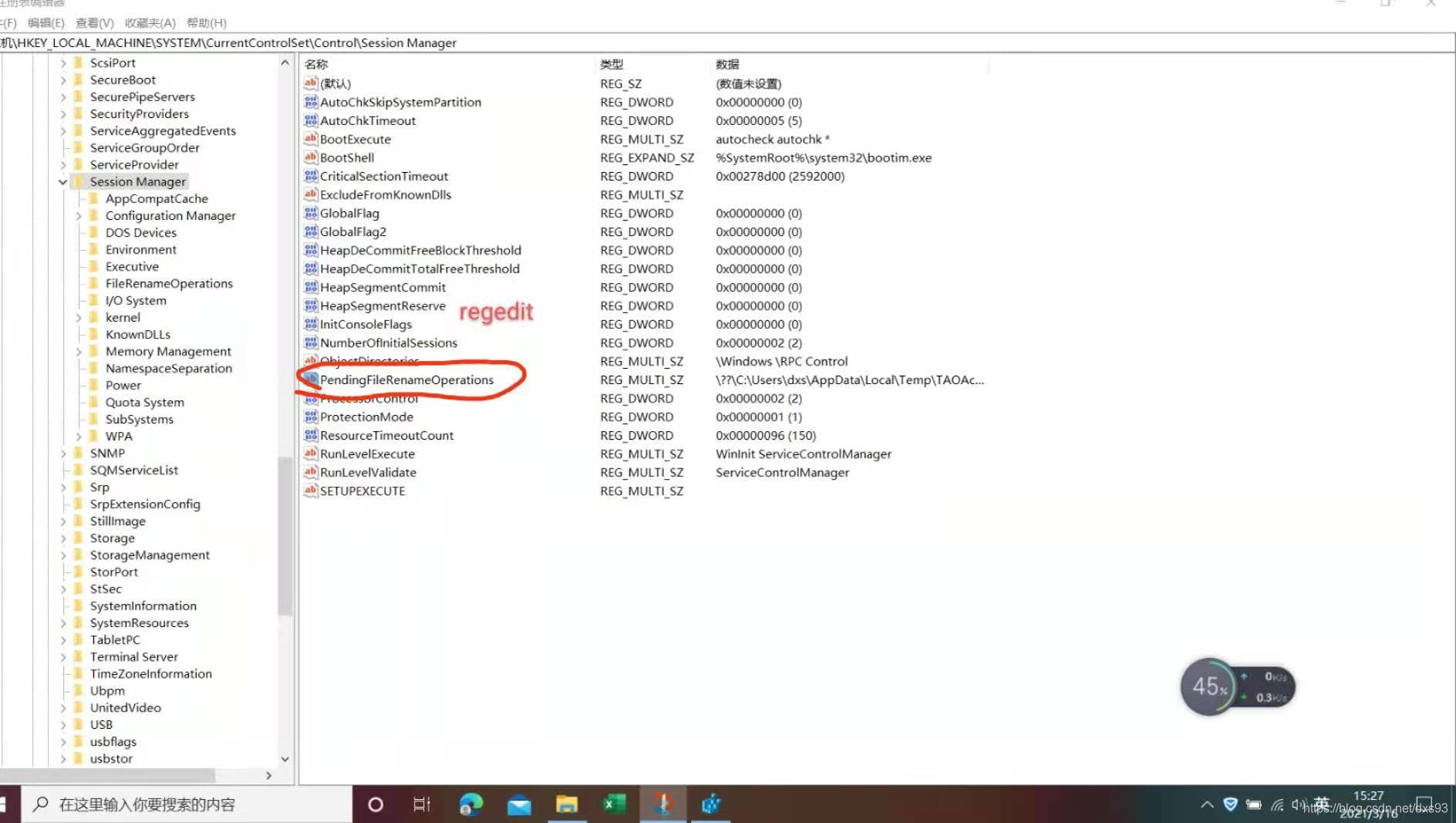
1电脑安装要求硬件要求:TIA软件主要是要求电脑内存要大, 一般要求至少8GB以上,低于这个内存不建议安装,安装上也太卡。对于其他硬件不做要求,最好是游戏本2安装博图之前需要删除注册表按Windows+r输入regedit回车最后删除红色圈就可以安装了...
等待一组数字量输入指令,用于多个输入数字量的指示!DO8421(9.17.0)该指令含义为将9-17端口的虚信号输出为0(图1)(CALL指令)子程序调用指令,用于程序中调用子程序(SetSimDO指令)设置虚拟数字量输出指令,用于程序中设置虚拟输出指令!
埃斯顿机器人程序模版案例,欢迎指点。

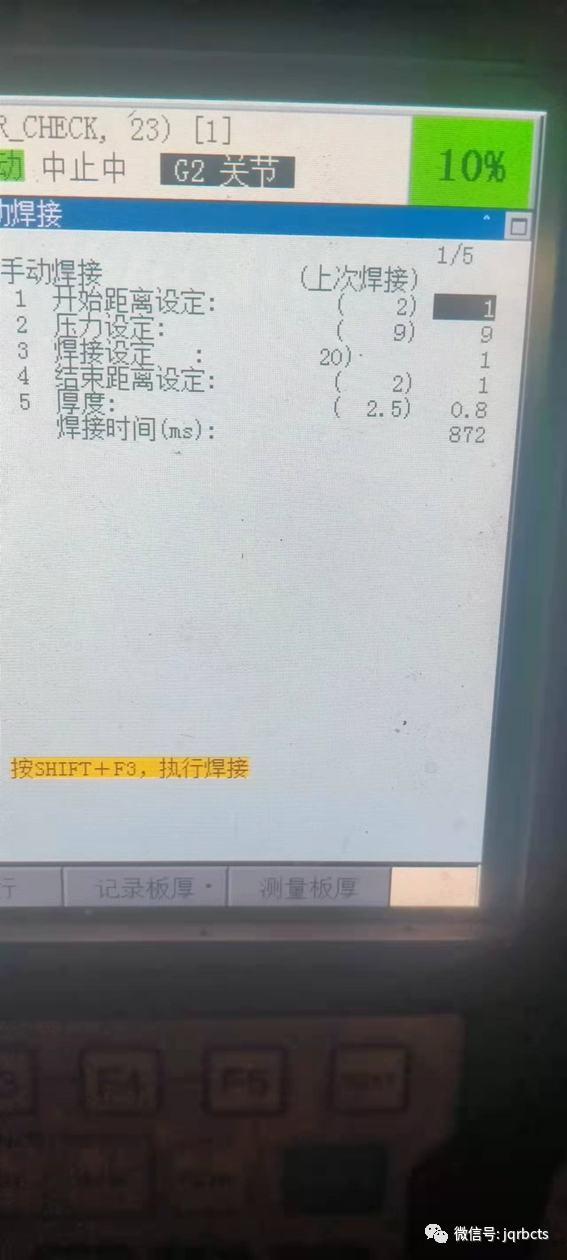
1机器人点焊时接触位置不正确,要考虑到机器人的厚度是否与当前的厚度相互匹配,要考虑到机器人的压力是否超过最大压力,2层板的要压力设置在2200N,要考虑到机器人电极帽的静臂是否与产品贴紧。2关于机器人的碰撞检测报警要考虑到机器人的压力是否超过最大压力,要考虑到机器人的碰撞灵敏值是否在范围。3关于机器人在自动模式下,示教器打无效,MENU-下一页-enter-系统-配置-启用外部专用信号-43远程/
用于世界,关节,笛卡尔坐标系位置查看,坐标系的切换。用于程序查看,已经加载的可以使用这个按键。用于文件的查看和程序的导入和导出。用于用户登录界面和语言切换界面。用于IO 的监控和修改。