




- @condom10010
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
润色过程主要考虑语言的流畅性、表达的准确性和正式性,以及句子之间的连贯性。同时,保留原文中的关键信息和技术术语,以确保润色后的内容仍然符合论文的专业性和准确性要求。并且显示润色前后的对比。具体指出你到底润色了哪一段话或哪一个单词。另外,保留参考文献内容。
[Jetson]查看nvidia orin 上安装的Jetson的版本
代码】[docker入门教程系列] 使用dockerfile创建cuda:11.0-cudnn8-devel-ubuntu18.04镜像。
docker入门实操。帖子聚合。
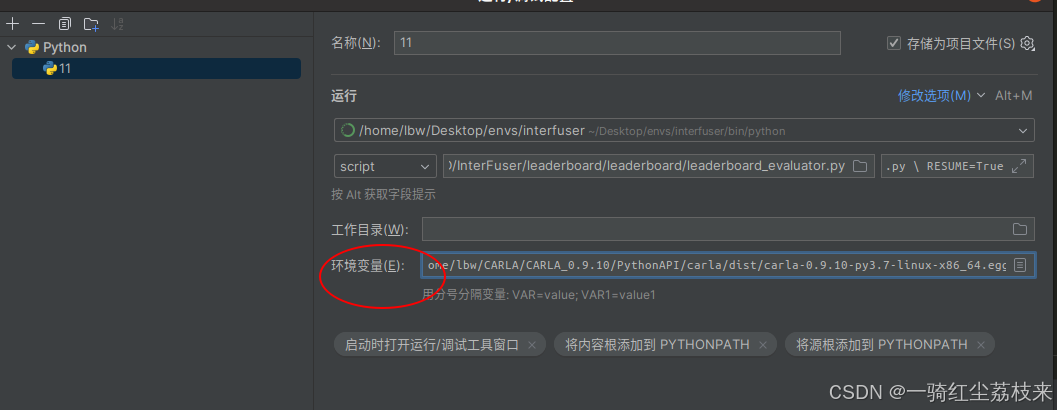
import carla报错,可以尝试在环境变量中加入。
docker入门实操。帖子聚合。
这里再介绍一种高深的方法来在Python中创建数据对象:types.SimpleNamespace。该类添加自Python 3.3,可以用属性访问的方式访问其名称空间。也就是说,SimpleNamespace实例将其中的所有键都公开为类属性。因此访问属性时可以使用obj.key这样的点式语法,不需要用普通字典的obj[‘key’]方括号索引语法。正如其名,SimpleNamespace很简单,基本
numpy_data = tensor_data.numpy()虽然TensorFlow网络在输入Numpy数据时会自动转换为Tensor来处理,但是我们自己也可以去显式的转换:
参考链接:latex安装教程(texlive+texstudio)并添加IEEE模板_texstudio怎么导入模板-CSDN博客
修改后,下面会提醒你需要重启Nomachine服务器来使得修改生效。点一下重启服务器就好了。编解码方式改为H264,其他全部勾选,第三项使用特定帧数改为60HZ。
