




- @Yangy_Jiaojiao
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
机器视觉就业公司解读~机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品(即图像摄取装置,分CMOS和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动

1. 新兴技术方向(1) 具身智能(Embodied AI)方向特点:大模型作为机器人的"大脑",实现物理世界交互关键技术VLA(Vision-Language-Action)模型:如Google的RT-2,将动作输出作为特殊token世界模型(World Model):NVIDIA的Eureka通过LLM自动生成奖励函数多模态记忆:Meta的实现长期记忆存储(2) 实时决策优化代表工作RT-H(
2021年学习,当时参加科大讯飞的智能车大赛,【语音交互启动-teb算法路径规划+A*算法自动避障+路径最短优化+yolo5目标检测+视觉结果判断分类+终点指定点位自动泊车+语音播报。【讯飞学院】http://www.iflyros.com/home/

公司:大疆、百度、腾讯、阿里、华为、字节跳动、京东、高德、美团、旷世、商汤、虹软、云从、依图、智行者、地平线、Nvidia、四维图新、中科创达、微软、英特尔、momenta、上汽、小鹏汽车、蔚来汽车、驭势、海康威视、达闼、极智嘉、擎朗、追觅、石头、肇观、华捷艾米、优必选、银星智能、普渡、高仙、思岚、视辰、小米、OPPO、VIVO、奥比中光、速腾聚创、禾赛、Pico、indemind、中科慧眼、图漾
解决思路根据错误信息,您的应用程序和库依赖于较新的 GNU C Library (glibc) 版本(如 GLIBC_2.32, GLIBC_2.33, GLIBC_2.34),而您当前的系统中安装的是一个较旧版本的 glibc。Ubuntu 20.04 默认带有 glibc 2.31,这解释了为什么它找不到所需的 glibc 版本。

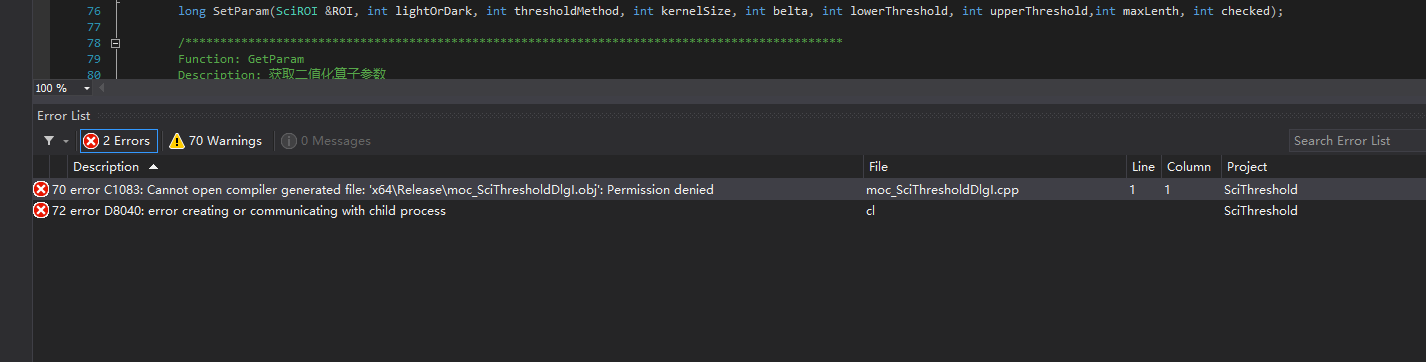
字符串常量,放在哪个存储区呢?是“自动存储区”还是“静态存储区”中?好像应该不是在“栈区“分配空间吧!!!
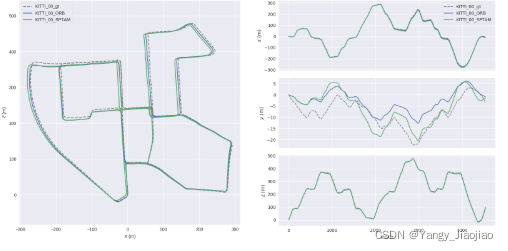
用于处理、评估和比较里程计和SLAM算法的轨迹输出。支持的轨迹格式:“TUM”轨迹文件“KITTI”姿态文件“EuRoC MAV”(.csv groundtruth和TUM轨迹文件)ROS和ROS2 BAG文件,带有几何图形/PoseStamped、几何图形/TransformStamped、几何图形/POSEWITH协方差统计或导航/里程计主题或TF消息1 精度测评evo_ape 绝对姿势误差e
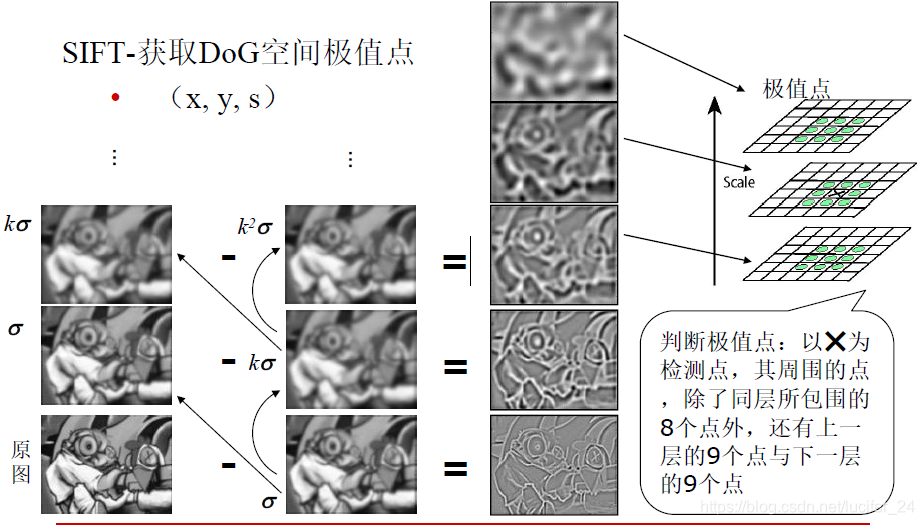
Opencv三种特征ORB、SIFT、SURF特征介绍,图像金字塔,灰度质心法
高斯分布及归一化、标准化、零均值化