




- @YOULANSHENGMENG
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
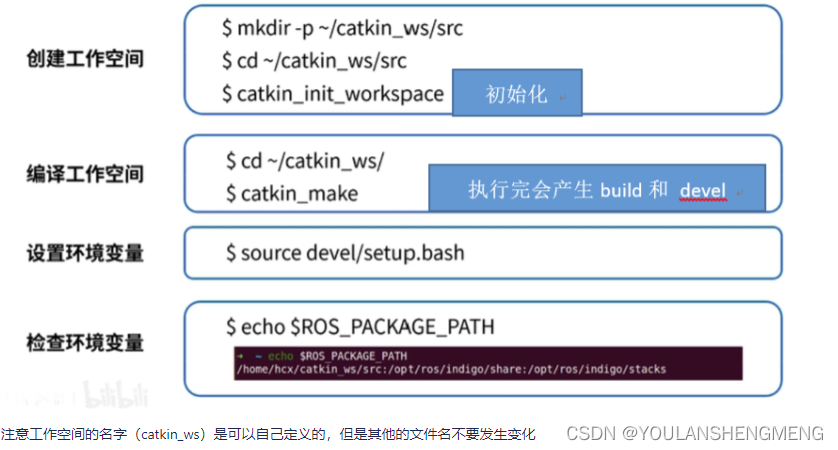
将上图中的,CMakeLists.txt文件中的内容,替换为下面的内容。1,首先打开一个终端,输入roscore,启动ros。通过以上操作就可以将文件夹中的图像转换为bag包。2,打开新的终端,进入工作空间,执行以下语句。
一,安装参考博文vscode安装和使用教程 Java_悲恋花丶无心之人的博客-CSDN博客_vscodejava使用教程二、VS Code连接远程服务器运行Python程序参考博文:VS code 远程连接服务器步骤 - kkzhang - 博客园「效率」使用VScode连接远程服务器进行开发 - 知乎1,先检查自己电脑上是否安装已经安装OpenSSH按下快捷键Win + X,选择Windows
在卷积神经 网络的开源框架中,一般每层的数据和权重都使用四维的张量的表示。一个四维张量的形状是(N*C*H*W)或(N*H*W*C),其中N是批处理的大小,因为一般训练模型都是采用批量数据;C是特征通道数目,H*W是特征图的高和宽。通道内特征和通道间特征:在卷积神经网络中,下一层网络的神经元同时融合了上一层特征通道中对应空间位置的神经元及其邻接位置元的信息,以及不同特征通道对应空间位置的神经元信息
yolov8_obb基于c++的工程部署
将CMakeLists.txt文件中,87行到102行注释掉。这样不会影响到动态库的使用。修改:zxing-cpp/zxing.cmake。cd {你用来保存stb包的文件夹}
1,瓶颈结构1)什么是瓶颈结构瓶颈结构就是两头宽,中间窄的网络结构,先降维然后升为维;瓶颈结构不仅增加了网络的深度同时还有效的减少了网络的参数;比较经典的应用:ResNet左边的计算如下:w*h*256*3*3*256 =589824*w*h右边的计算如下:w*h*256*1*1*64 + w*h*64*3*3*64 +w*h*64*1*1*256 = 69632*w*h结果相差大概8.5倍。在移
激活函数的作用:增加网络的非线性能力1,Sigmoid函数特点:经过改函数作用后的值分布在【0,1】之间,导数的范围也为【0,1】之间,模拟了一个神经元随着输入不断增加从完全不激活状态到完全激活的过程;缺点:1)两端是饱和区,饱和区域内的梯度接近为0,会带来熟悉的梯度消失的问题。一旦神经元进入到饱和区,就难以继续优化;2)Sigmoid导数会变的越来越小,导致梯度越来越难回传,会降低网络的收敛的
1.什么是注意力机制当我们人类在看东西时,一般会将注意力集中注视着某个地方,而不会关注全部所有信息。例如当我们一看到下面这张猫的图片时,主要会将目光停留在猫的脸部,以及留意猫的躯干,而后面的草地则会被当成背景忽略掉,也就是说我们在每一处空间位置上的注意力分布是不一样的。如下图,当需要识别的是猫咪的时候,其他绿色本经特征就是无用的。attention机制就是找到这些最有用的信息。深度学习中的注意力机
1,常规卷积操作对于一张5×5像素、三通道彩色输入图片(shape为5×5×3)。经过3×3卷积核的卷积层(假设输出通道数为4,则卷积核shape为3×3×3×4),最终输出4个Feature Map,如果有same padding则尺寸与输入层相同(5×5),如果没有则为尺寸变为3×3。Depthwise Separable Convolution是将一个完整的卷积运算分解为两步进行,即Dept
目录1,什么时候需要多个输入2,常见的多输入网络2.1 Siamese网络(孪生网络)2.1 Triplet网络1,什么时候需要多个输入深度学习网络一般是输入都是一个,或者是一段视频切片,因为大部分的内容是对一张图像或者一段视频内容进行分析。但是也有任务需要输入图像对来得到相对结果,比如检测两个图像的相似度,通过目标跟踪得到相对位置。还有些网络也可以输入多张图像进行多尺度的特征提取。比如图像检测,