- @Rosen_er
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
Doxygen是一个能从带注释的源码中自动生成说明文档的标准工具,它支持众多流行的编程语言,包括C/C++、C#, PHP, Java, Python, IDL 等

目标定位在softmax层中不仅仅只输出分类信息,还可以输出目标的外接矩形框的角点和长宽,这样就可以转化为一个逻辑回归的问题。只要在训练集上对相应信息进行标注,以及定义合适的损失函数,就可以通过实现对目标的定位。目标检测滑动窗口法首先设定固定大小的窗口,以固定步长遍历图像,每次都将窗口内的图像传入分类网络进行分类,以达到对目标的检测效果。但是,步长的选择无法适应不同情况。过大的步长计算成本低,
简介 楼主在这一年从事的图像实时检测中涉及到深度学习的内容,于是在没有积累的情况下自己探索了三种方法,接下来分为三篇文章依次进行介绍并对比分析它们的优点。 目前使用比较广泛的深度学习框架有pytorch和TensorFlow两种,我选择使用的是pytorch,但原本的工程是基于C++实现的,为了适配于pytorch我发现了libtorch。libtorch可以说是pytorch的C++移植版本
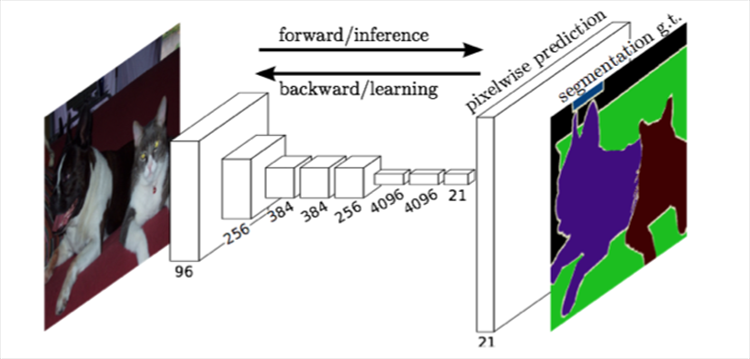
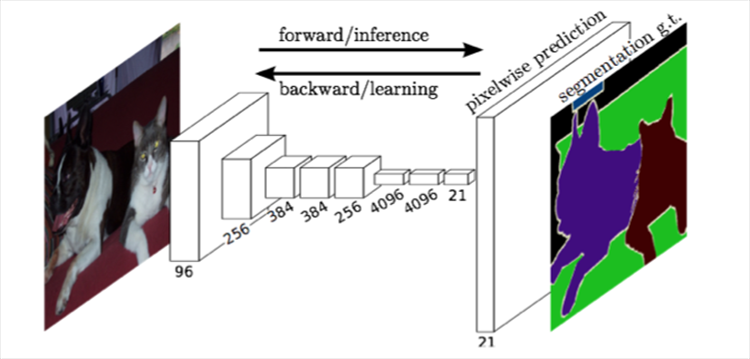
Deep Learning In Image Segmentation简介图像分割是指根据灰度、色彩、空间纹理、几何形状等特征把图像划分成若干个互不相交的区域,使得这些区域在同一区域内表现出一致性或相似性,而在不同区域间表现出明显的不同。图像分割可以认为是按照像素进行分类的问题。传统分割方法基于阈值的分割方法阈值法的基本思想是基于图像的灰度特征来计算一个或多个灰度阈值,并将图像中每个像素的灰度
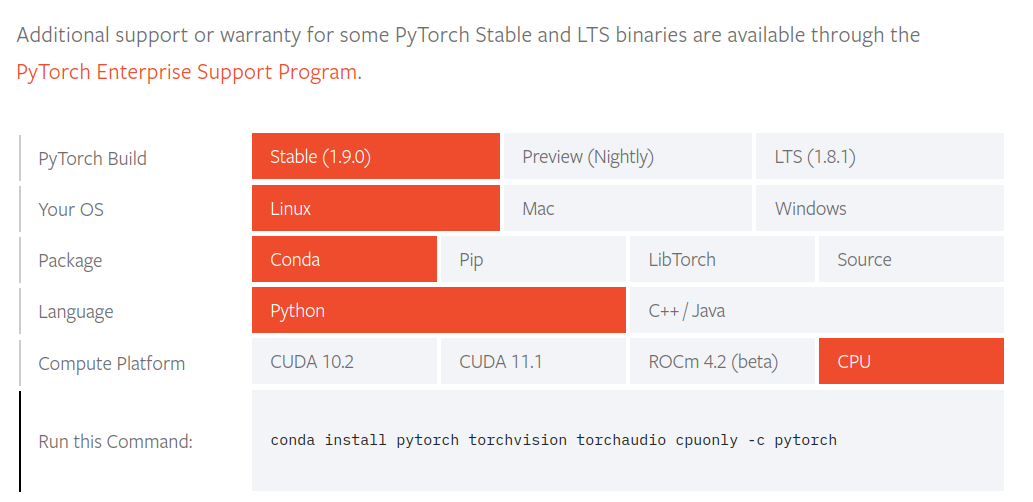
上一篇文章我曾经提到过,libtorch在进行图像实时检测中性能并不突出,很多时候无法满足我们的需求,后来我在想能不能现在pytorch上训练模型,只将libtorch作为一个加载模型的工具呢?经过尝试我发现这种方法是可行的,并且无论是在运行时间上还是在预测的准确率上都要优于前者,本文章将介绍如何在pytorch上训练模型并用libtorch进行加载预测。pytorch安装 pytorch官
简介 楼主在这一年从事的图像实时检测中涉及到深度学习的内容,于是在没有积累的情况下自己探索了三种方法,接下来分为三篇文章依次进行介绍并对比分析它们的优点。 目前使用比较广泛的深度学习框架有pytorch和TensorFlow两种,我选择使用的是pytorch,但原本的工程是基于C++实现的,为了适配于pytorch我发现了libtorch。libtorch可以说是pytorch的C++移植版本
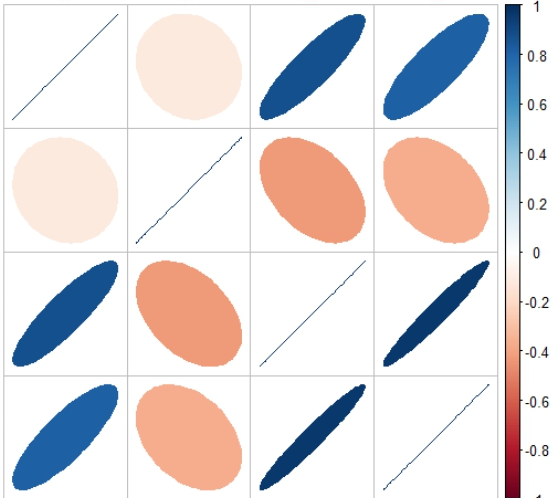
数学建模竞赛知识点汇总(四)——相关性检验文章目录数学建模竞赛知识点汇总(四)——相关性检验简介皮尔逊相关系数总体person相关系数样本person相关系数皮尔逊相关系数假设检验前提步骤流程斯皮尔曼相关系数皮尔逊相关系数与斯皮尔曼相关系数对比后续简介相关性分析是研究两个或两个以上的随机变量间的相关关系的统计分析方法,例如降水与地形、降水与温度等的相关关系。相关分析前,首先通过散点图了解变量间大
Deep Learning In Image Segmentation简介图像分割是指根据灰度、色彩、空间纹理、几何形状等特征把图像划分成若干个互不相交的区域,使得这些区域在同一区域内表现出一致性或相似性,而在不同区域间表现出明显的不同。图像分割可以认为是按照像素进行分类的问题。传统分割方法基于阈值的分割方法阈值法的基本思想是基于图像的灰度特征来计算一个或多个灰度阈值,并将图像中每个像素的灰度
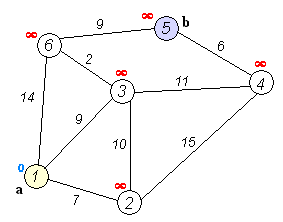
简介LiveWire是一种图像分割技术,允许用户使用相对少的鼠标点击次数快速准确地选择感兴趣区域,其实现过程可分为以下两个部分:使用滤波算法过滤并转换成灰度使用Dijkstra算法应用到修改后的图像,从用户分别点击的两个点中找寻出最佳路径在 LiveWire 算法中, 待分割二维图像被视作有向加权图 G, 像素被视为 G 中的节 点, 连接相邻节点的视为边。由此可以定义代价函数作为边的权值,
简介 随着研究的逐渐深入,我了解到pytorch训练模型再用libtorch加载实际上是一种很绕弯的方法,它的确能够满足我们的需求,但也许不是最好的一种方法。如今比较通用的模型格式是ONNX模型,所以我就在想能否使用这种通用的模型来解决问题呢? 远在天边,近在眼前,没想到OpenCV自己就有DNN模块能够直接加载,我们要做的只需要将pytorch训练出的pth模型转成ONNX模型即可。本文章将