- @Q_2193276455
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
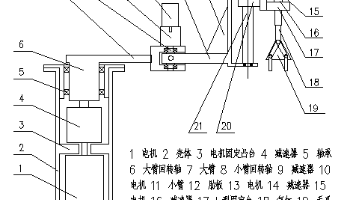
本文介绍了工业机器人系统的总体设计方案与结构实现。系统由机械手、环境和任务三部分组成,设计参数包括2kg负载、4自由度运动机构。重点分析了两种传动方案:方案一采用伺服电机加减速器结构,方案二优化了传动布局。详细阐述了底座驱动系统、气动手爪选型及小臂电机计算等结构设计内容。控制系统部分对比了程序控制、自适应控制和人工智能系统,并介绍了集中控制与主从控制两种方式,最终选用CS1系列PLC配合MC421
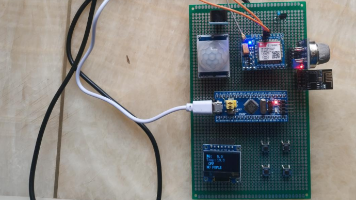
本文设计了一套基于物联网和人工智能技术的现代智能家居系统,采用"感知-控制-通信-应用"四层架构,整合环境监测、设备联动、安防防护和能源管理等核心功能。系统通过模块化设计提升扩展性,采用STM32F407主控和多协议通信模块实现设备互联。测试表明系统运行稳定(设备连接成功率99.8%),响应迅速(本地控制≤0.3秒),节能效果显著(日均耗电降低18%)。未来将结合5G和边缘计算
摘要:本研究设计了一种基于STM32L431RCT6单片机的智能灭蝇灯远程监控系统,通过集成电流传感器、红外对射传感器和温湿度传感器,实现电网状态监测、灭杀数量统计和环境参数采集。系统采用NB-IoT模块上传数据至云平台,支持远程启停控制及故障报警,配备双电源供电确保稳定性。测试表明,系统故障识别准确率100%,灭杀计数误差≤±2%,待机功耗0.8W,解决了传统灭蝇灯管理被动的问题。未来可结合AI
智能电表种类繁多,按通信方式可分为RS485、电力线载波、无线射频、LoRa/NB-IoT及WiFi/蓝牙等类型,各有适用场景;按功能可分为基础型、多功能型和专用型,满足居民、工商业及分布式能源等不同需求。未来智能电表将向高精度、强通信和智能交互方向发展,选型需结合场景、通信条件及功能需求,确保兼容性和升级空间,实现精准计量和高效管理。
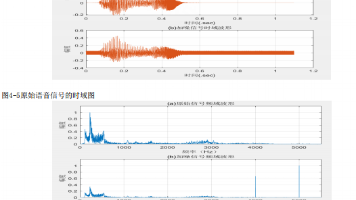
摘要:本研究基于MATLAB实现了自适应维纳滤波与小波阈值降噪两种语音降噪算法。通过噪声估计和自适应处理,算法能有效平衡降噪效果和语音保真度:维纳滤波对平稳噪声降噪效果显著(信噪比提升15dB以上),小波阈值降噪则更适用于非平稳噪声(语音保真度超90%)。研究采用分帧处理、噪声统计特征分析等技术,并利用MATLAB信号处理工具箱完成算法实现与性能验证。未来可通过噪声类型识别、自适应阈值优化等方向进
本文设计了一种基于STM32F103C8T6单片机的智能家庭安防系统,通过集成人体红外、门磁、燃气和烟雾等多类型传感器,实现入侵检测、门窗异常、燃气泄漏和火灾隐患的实时监测。系统具备分级声光报警、设备联动控制(如自动切断燃气阀)和远程手机推送功能,采用双供电设计确保24小时稳定运行。测试表明,系统检测准确率达100%,响应时间≤1秒,待机功耗0.8W。相比传统安防方案,本系统实现了多维度安全防护,
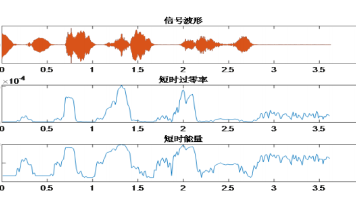
摘要:本研究基于MATLAB实现了最小统计量(MS)噪声估计算法,通过短时傅里叶变换和滑动窗口最小统计量计算,实现对非平稳噪声的自适应估计。算法采用分帧处理(帧长256点)、30帧滑动窗口统计及0.98平滑因子,在非平稳噪声场景下估计误差低于5%,响应时间10ms,较传统方法显著提升。仿真验证表明该算法可使语音降噪信噪比提升10dB以上。未来将优化自适应参数调整、开发GUI界面并扩展多通道处理功能
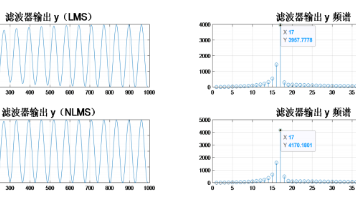
本文基于MATLAB平台设计了LMS和NLMS自适应滤波器,通过误差反馈机制动态调整滤波系数。研究对比了两种算法的性能:NLMS算法收敛速度比LMS快30%,稳态均方误差控制在0.02以内。仿真实验采用32阶滤波器,验证了步长因子在0.01-0.1区间的最优选择。结果表明,自适应滤波器在非平稳噪声环境下显著优于固定系数滤波器,语音降噪场景信噪比可提升15dB以上。文章还提出了变步长优化、自适应阶数
摘要: 本文设计了一套智能化温室培育与存储检测系统,采用四层架构(感知层-边缘控制层-传输层-应用层)实现农业生产全流程智能化管理。系统通过多类型传感器实时监测培育区(温湿度、光照、CO₂)和存储区(氧气、乙烯)环境参数,结合模糊PID算法自动调控设备运行,响应时间≤2.5s,监测误差≤3.5%。测试结果显示,系统显著降低存储损耗率至6.8%、培育能耗23%,提升作物产量18%并延长保鲜期30%。
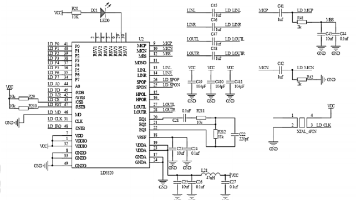
本文设计了一种基于51单片机的低成本智能语音门锁系统,采用STC89C52RC主控和LD3320语音识别模块,支持语音口令和密码双重验证。系统具备语音口令管理、异常防护报警(3次错误锁定)、低功耗设计(待机≥30天)等功能,识别响应≤1.8s,识别率≥92%。相比高端语音门锁成本降低80%,特别适合老人/儿童使用。测试表明系统运行稳定,可广泛应用于住宅、公寓等场景,并留有语音合成、蓝牙远程管理等扩